产品概述
YJUAV AIRSPEED是一款基于MS4525D传感器芯片I2C接口的小型空速计模块,可以测量飞行器的气压高度和飞行空速信息。

采购链接
规格参数
| 规格项 | 参数值 |
|---|---|
| 开源飞控 | 支持Ardupilot、PX4 |
| 工作电压 | 2.7~5.5V |
| 工作电流 | 3mA |
| 气压范围 | 0~300psi |
| 测量误差 | ±0.25% |
| 工作温度 | -25℃~+105℃ |
| 连接器型号 | JST GH1.24 4PIN |
| 软管长度 | 80cm*两根 |
| 线材长度 | 25cm |
| 外形尺寸 | PCB板:长24mm*宽16mm*高10.5mm |
| 重量 | 16.6g(不含软管和线材) |
产品尺寸

使用说明
AIRSPEED空速计是4Pin I2C接口,可插到飞控的任意I2C接口上,均可使用;
空速计常在固定翼飞行器或者垂直起降飞行器上使用,飞控应烧录固定翼、垂直起降的固件;
模块安装
模块PCB板安装方式:
一种是使用附赠的双面胶将模块粘贴在所需位置上;
另一种是使用四个M1.6的螺丝将模块固定在无人机上,螺丝安装孔距见产品尺寸图;
空速管应安装于无人机的气流来流方向(机头或者左右机翼上),气孔朝飞行正前方,并远离螺旋桨,防止螺旋桨转动时的气流扰动;
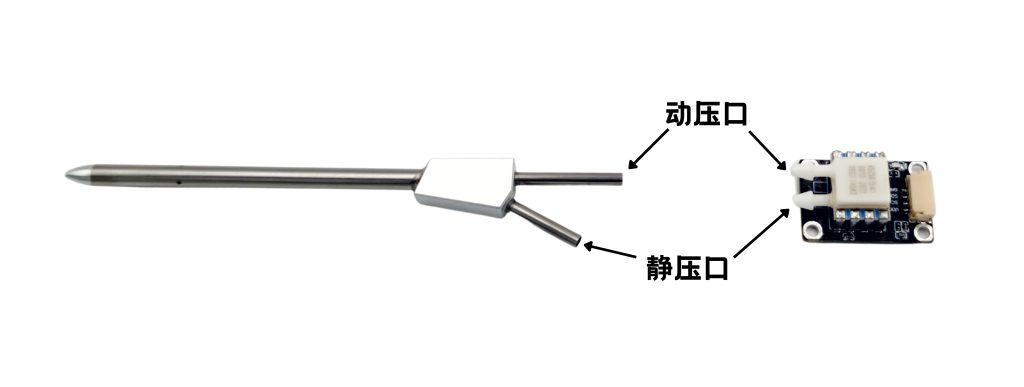
软管连接
空速计套餐搭配了两根80cm长的硅胶软管,软管的长度可以根据实际装机所需要的长度自行进行裁剪;
空速管与空速模块之间的软管连接方式如下图所示,相同的气压口用软管连接在一起;
机舱内的软管可以用胶布固定在舱壁上,管路排布时注意不要挤压软管,防止出现气流不畅,空速测量异常;
Ardupilot飞控
参数设置
如下进行飞控参数设置,然后重启飞控;
ARSPD_TYPE = 1 //设置空速计类型,1:I2C-MS4525D0
ARSPD_USE = 1 //设置是否将空速计数值用于实际的飞行控制,1:Enable
ARSPD_BUS = 1 //I2C总线选择,一般选择1,实际根据你使用哪个I2C接口来选择,0:I2C0 1:I2C1 2:I2C2重新连接飞控后,可以在上位机仪表上看到空速信息;
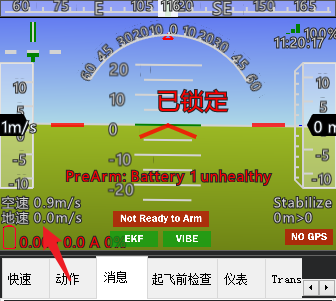
对准空速管气孔吹气,观察空速数值是否明显增大,一般未吹气时空速大约为0~3m/s范围,偶尔会跳动到4m/s、5m/s,吹气后空速会明显增至10m/s以上;
空速校准
Ardupilot飞控在每次上电初始化过程中,空速传感器的数值会自动校准归零,在室内或室外无风的环境下,则不需要手动校准空速计;
在室外有风的环境下,每次飞控启动后,飞机飞行前最好手动进行空速计校准,手动校准方法如下;
必须将空速计模块、两根硅胶软管、空速管组装好后,再进行空速计校准;
1、用手捂住空速管,挡住自然风对空速计的影响,但注意不能堵住正前方和侧方的五个气孔;

2、如下图在上位机中选择“PREFLIGHT CALIBRATE”,点击“执行动作”开始校准;
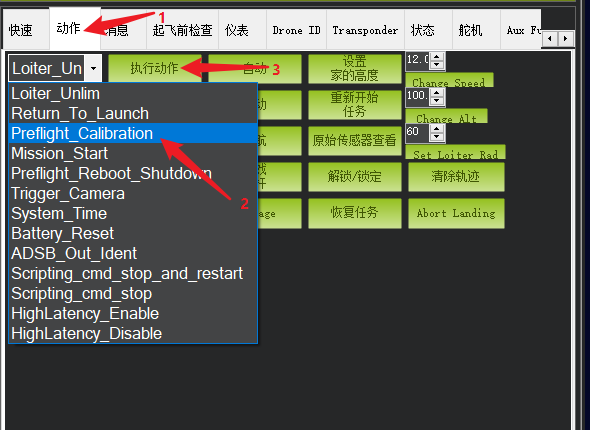
3、校准完成之后,执行动作的按钮颜色恢复正常,同时“消息”栏目中会打印校准完成的文字;

PX4飞控设置
参数设置
如下进行飞控参数设置,然后重启飞控;
SENS_EN_MS4525DO = 1 //使能MS4525DO空速计传感器重新连接飞控后,可以在上位机首页上看到空速信息;
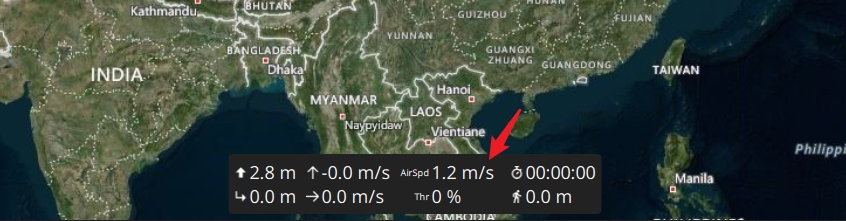
对准空速管气孔吹气,观察空速数值是否明显增大,一般未吹气时空速大约为0~3m/s范围,偶尔会跳动到4m/s、5m/s,吹气后空速会明显增至10m/s以上;
空速校准
必须将空速计模块、两根硅胶软管、空速管组装好后,再进行空速计校准;
1、用手捂住空速管,挡住自然风对空速计的影响,但注意不能堵住正前方和侧方的五个气孔;
2、如下图进行操作,开始校准空速计

3、当校准界面出现“[cal] Blow into front of pitot without touching”打印文字后,对准空速管最前端气孔进行吹气,吹气气压达到50Pa后,即可完成校准;

4、如果多次校准均失败,应检查两根硅胶软管是否装反了位置;