产品概述
YJUAV RNOTE 3 Ultra,支持DroneCAN协议的厘米级定位与定向模块,支持RTK移动站和基站功能,两个模块组合可以支持双天线航向功能,可应用于无人机、无人车、无人船等载具上。
模块内置u-blox ZED-F9P导航芯片模组,具有多星多频、高精度定位、快速收敛等特性,RTK定位精度0.01m。内置工业级RM3100磁罗盘传感器,冗余磁航向功能。对比普通UART版本u-blox ZED-F9P模块,CAN通信抗干扰强,工作稳定,传输速率高达1Mbit/s。
两个模块组合搭配可以输出双天线航向数据,避免磁航向干扰问题,并且实现双GPS或RTK定位数据提供给飞控,达到定位冗余效果。行业首例运行硬实时操作系统ThreadX,航空级安全认证。完全适配开源飞控Ardupilot/PX4。

产品特性
- CAN通信,DroneCAN/UAVCAN通信协议,实时性强,通信稳定;
- 多星多频,同时支持GPS、BeiDou、GLONASS、GALILEO等全球主流定位导航;
- RTK定位,搜星快速收敛、先进的RTK算法、厘米级定位精度;
- 双天线定向,使用双天空端模块即可实现精准稳定的航向数据,代替磁罗盘航向;
- 双GPS冗余,使用双天空端模块实现航向功能,同时支持双GPS数据提供给飞控;
- 硬实时操作系统ThreadX,航空级安全认证;
- 完全适配开源飞控Ardupilot/PX4;
采购链接
规格参数表
| 规格项 | 参数值 |
|---|---|
| 处理器 | STM32F4 主频100MHz |
| 卫星接收器 | u-blox ZED-F9P 184通道 |
| 电子罗盘 | 工业级RM3100 |
| 实时系统 | ThreadX硬实时系统 |
| 导航卫星系统 | 北斗、GPS、伽利略、格洛纳斯 |
| 并发卫星系统 | 4 |
| 卫星频段 | BeiDou: B1L B2L GPS: L1C/A L2C GLONASS: L1OF L2OF GALILEO: E1B/C E5b QZSS: L1C/A L2C |
| 导航刷新率 | RTK 20Hz RAW 25Hz PVT 25Hz |
| 定位精度 | RTK定位:0.01m + 1ppm CEP 单点定位:1.5m + 1ppm CEP SBAS辅助定位:1.0m + 1ppm CEP |
| 收敛时间 | RTK < 60s |
| 捕获卫星 | 冷启动 < 24s 热启动 < 1s |
| 灵敏度 | 冷启动:-148dBm 热启动:-157dBm 再次捕获:-160dBm 追踪导航:-167dBm |
| 抗干扰性 | CW主动式检测与消除 |
| 数据安全性 | 高级反欺骗算法 |
| 天线增益 | 2dBi(可更换天线,标准SMA母头座子) |
| 双天线测向功能 | 支持 |
| 通信方式 | CAN通信 |
| 通信协议 | DroneCAN协议 |
| 飞控类型 | Ardupilot/PX4 |
| 接口类型 | GHR-04V-S or USB Type C |
| 扩展接口 | PPS 外部事件输出 |
| USB输入电压 | 4.75 – 5.25v |
| 工作温度 | -40℃ to 85℃ |
| 尺寸 | 51.2*33.2*14.2mm(不含天线高度)、68.7mm(含天线高度) |
| 重量 | 43.5g(含天线) |
接口说明
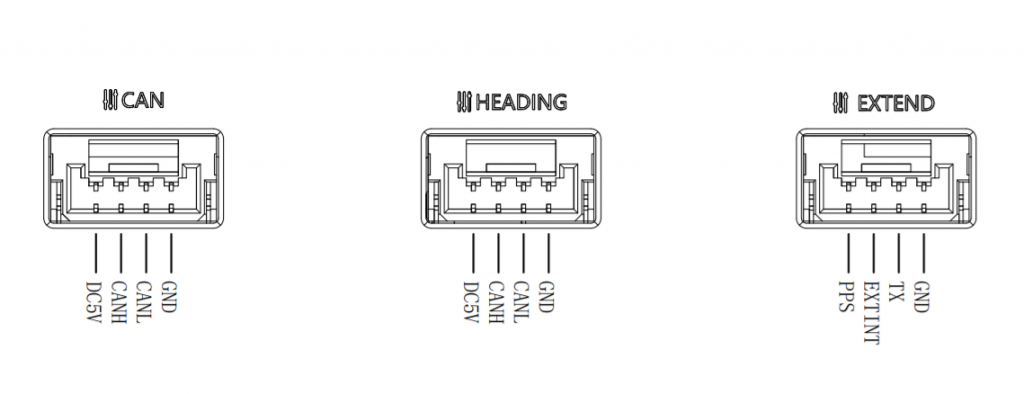
产品的接口线序及接口说明如下所示;
CAN接口用于连接飞控,USB接口用于连接地面站,HEADING接口用于双天空端之间的通信,EXTEND扩展口用于获取PPS信号、事件信号、TX串口消息。
指示灯状态
ST状态灯
常亮状态 – 一直处于这个状态,表示系统存在异常,无法正常使用;
特慢闪状态 – 没搜索到卫星;
慢闪状态 – GNSS定位成功;
快闪状态 – RTK定位成功;
GPS状态灯
常亮状态 – 未定位;
闪烁状态 – 定位成功;
RTK状态灯
红色常亮 – 未RTK定位;
绿灯常亮 – RTK定位成功;
使用说明
本模块可以在支持CAN接口和DroneCAN协议的飞控上使用,开源飞控支持Ardupilot固件和PX4固件;
模块安装
模块可使用双面胶粘贴的方式固定在无人机上,由于模块内置电子罗盘传感器,因此注意要远离电机、电调、电池等大功率用电设备,减少对模块的磁干扰;
注意:模块安装时,安装角度比较灵活,与飞控的机头方向的角度选择可以是:0°,45°,90°,135°,180°,225°,270°,315°。
Ardupilot飞控
单天空端应用
使用一个RNOTE 3 Ultra模块用于单天空端时,将该模块CAN接口接入到飞控的CAN1/CAN2通信接口;
飞控设置完以下参数后,需重启飞控,参数才能生效;
修改全部参数列表,以下对应参数
//如果接入CAN1接口,设置以下三个参数
CAN_P1_DRIVER = 1
CAN_D1_PROTOCOL = 1
GPS_TYPE = 9
//如果接入CAN2接口,设置以下三个参数
CAN_P2_DRIVER = 1
CAN_D2_PROTOCOL = 1
GPS_TYPE2 = 9如下图,重新连接地面站后,在首页仪表图可以看到GPS模块的定位状态;
无GPS(NO GPS)-- 表示飞控没有识别出来正确的GPS,需要检查硬件连接和参数设置
未定位 (NO Fix)-- 已经识别GPS设备,但没有搜索到卫星
2D定位 (2D Fix)-- 已经有少数卫星定位
3D定位 (3D fix)-- 已经很好的卫星定位
RTK浮点解定位(RTK Float)-- 表示达到普通得RTK定位,需要有RTK基站端搭配才会显示RTK定位
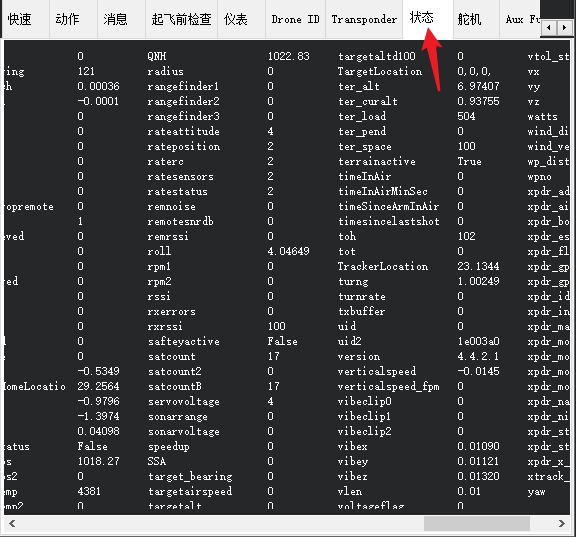
RTK固定解定位(RTK Fixed)-- 表示达很好的RTK定位,需要有RTK基站端搭配才会显示RTK定位如需了解GPS模块的更多状态信息,需打开地面站首页的状态页面;
主要观察以下状态数据,satcount(搜星数量)、gpsh_acc(水平定位精度,单位m)、gpsv_acc(垂直定位精度,单位m)、gpshdop(水平定位精度因子);
注意:
RNOTE 3 Ultra支持RTK定位功能,如还需RTK定位,则应搭配地面端基站进行使用;
双天空端应用
使用两个RNOTE 3 Ultra模块作为双天空端时,既能实现双GPS功能(双GPS互为冗余),还可以实现双天线航向的功能;
使用时,两个天空端模块用到了两个CAN接口,因此需要将飞控的两个CAN接口都打开,设置以下飞控参数;
//打开CAN1接口
CAN_P1_DRIVER = 1
CAN_D1_PROTOCOL = 1
//打开CAN2接口
CAN_P2_DRIVER = 1
CAN_D2_PROTOCOL = 1双GPS功能
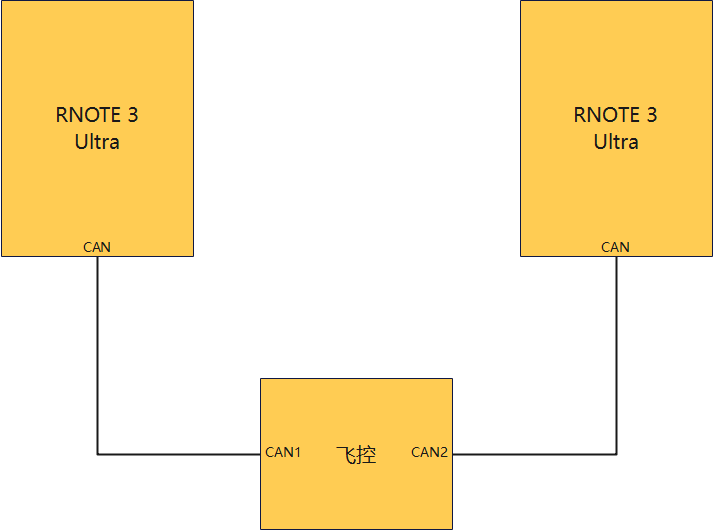
将两个模块的CAN接口,任意接入到飞控CAN1和CAN2接口上即可正常使用,如下图;
如果只需要双GPS功能,不需要双天线航向功能,则只需要设置下面三个飞控参数即可,不需要参考本节后面的内容;
//设置GPS1使用CAN1接口GPS模块
GPS_TYPE = 9
//设置GPS2使用CAN2接口GPS模块
GPS_TYPE2 = 9
//打开GPS冗余自动切换功能,任意一个模块失效时,另一个模块还能够起到备份冗余的作用;
GPS_AUTO_SWITCH = 1使用双GPS功能时,两个RNOTE 3 Ultra模块天线的安装位置没有限制,可以任意放置,只要保证天线无遮挡,搜星正常即可;
双天线航向功能
注意:
双天线航向功能对飞控的固件有版本的要求,需要Ardupilot 4.2.0及以上版本,双天线航向功能本质上是包含了双GPS功能;
两个RNOTE 3 Ultra模块的天线安装时,建议沿着飞控的X轴或者Y轴方向摆放,且天线周围无遮挡物;
建议使用馈线的方式延长并安装天线,且两个天线之间要保证30cm及以上的距离,才能获得稳定的双天线航向数据;
将两个模块的CAN接口,任意接入到飞控CAN1和CAN2接口上,同时两个模块之间的HEADING接口要用连接线连接在一起,如下图;
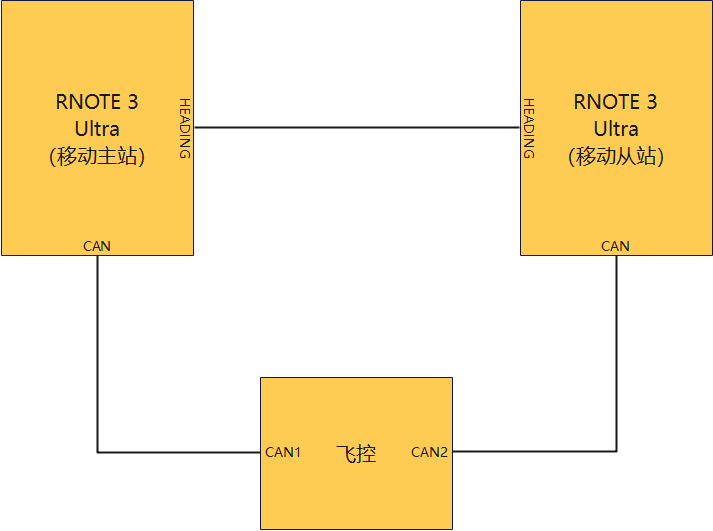
使用双天线航向功能时,两个RNOTE 3 Ultra模块有移动主站(moving baseline base)和移动从站(moving baseline rover)之分;
其中接入到CAN1接口的RNOTE 3 Ultra模块为移动主站,接入到CAN2接口的RNOTE 3 Ultra模块为移动从站;
首先使用地面站SLCAN功能设置两个RNOTE 3 Ultra模块的内部参数,设置完后飞控需重新上电;
//CAN1接口,移动主站,RNOTE 3 Ultra模块参数
//设置模块固定总线ID为100
CAN_ID = 100
//设置模块角色为移动主站
HEADING_ENABLE = 0
//CAN2接口,移动从站,RNOTE 3 Ultra模块参数
//设置模块固定总线ID为101
CAN_ID = 101
//设置模块角色为移动从站
HEADING_ENABLE = 1两个RNOTE 3 Ultra模块内部参数修改之后,应固定两个模块接线方式,不能再随意交叉接入飞控CAN1、CAN2接口,否则需要重新设置一次上述参数;
接下来设置以下飞控的参数,设置完后飞控需重新上电;
//设置GPS1为移动主站角色;
GPS_TYPE1 = 22
//设置GPS2为移动从站角色;
GPS_TYPE2 = 23
//设置GPS1使用CAN节点ID为100的RNOTE 3 Ultra模块;
GPS1_CAN_OVRIDE = 100
//设置GPS2使用CAN节点ID为101的RNOTE 3 Ultra模块;
GPS2_CAN_OVRIDE = 101
//打开GPS冗余自动切换功能;
GPS_AUTO_SWITCH = 1
//打开飞控自动配置CAN外设功能;
GPS_AUTO_CONFIG = 2
//开启EKF3双天线航向功能,并冗余磁罗盘航向;
//优先使用双天线航向作为无人机航向,出现异常时可自动切换至磁罗盘航向,实现航向双冗余;
AHRS_EKF_TYPE = 3
EK2_ENABLE = 0
EK3_ENABLE = 1
EK3_SRC1_YAW = 3
EK3_SRC2_YAW = 1
EK3_SRC3_YAW = 1
//设置GPS1天线、GPS2天线与飞控安装位置的相对XYZ距离,单位为m;
//这些参数的设置,一方面是用于将GPS天线定位位置偏移到飞控的位置,修正天线安装偏差;
//另一方面的作用,是提供用于飞控计算双天线的航向角;
GPS_POS1_X、GPS_POS1_Y、GPS_POS1_Z
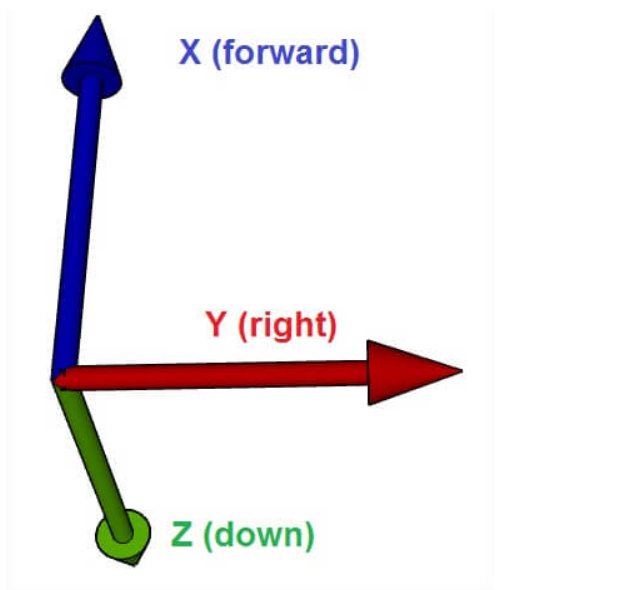
GPS_POS2_X、GPS_POS2_Y、GPS_POS2_Z设置GPS1天线、GPS2天线与飞控安装位置的相对XYZ距离,相当于三维空间坐标系中,飞控处于(0,0,0)位置;
模块安装在飞控的前方向X为正值,反之负值。模块在飞控的右方向Y为正值,反之负值。模块在飞控的下方向Z为正值,反之负值。
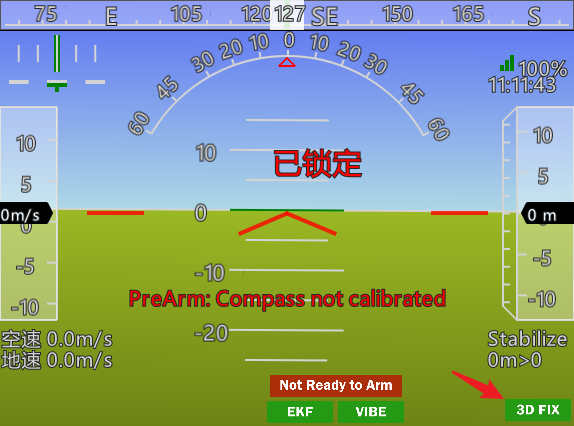
经过上面的设置,且双RNOTE 3 Ultra模块成功搜星后,飞控能够识别到双天线航向,如下图所示:
GPS1为3D DGPS定位状态、GPS2为rtk Fixed定位状态,代表GPS2(移动从站)接收到了GPS1(移动主站)的航向修正信息;
消息框中出现“EKF3 IMU0 is using GPS”和“EKF3 IMU1 is using GPS”字符串,代表飞控已经解算出双天线航向数据,可以正常使用;

上图中的“11”数字代表当前的双天线航向,第一次设置使用时,为进一步确认当前航向信息是正常的,可以使用手机的指南针功能进行校验;
将手机方向和飞控方向摆放一致。手机指南针和当前显示航向的角度正常相差会小于10°以内;
注意:
在使用双天线航向功能的同时,还可以使用RTK基站的功能;
地面端基站应用
使用USB Type-C线将RNOTE 3 Ultra模块连接到电脑,打开Mission planner地面站软件,无需设置飞控参数,打开设置页面(初始设置->可选硬件->RTK/GPS Inject);
将设置页面里的选项框都勾选上,选择模块对应电脑的USB COM端口,波特率不用修改,点击“连接”按钮;
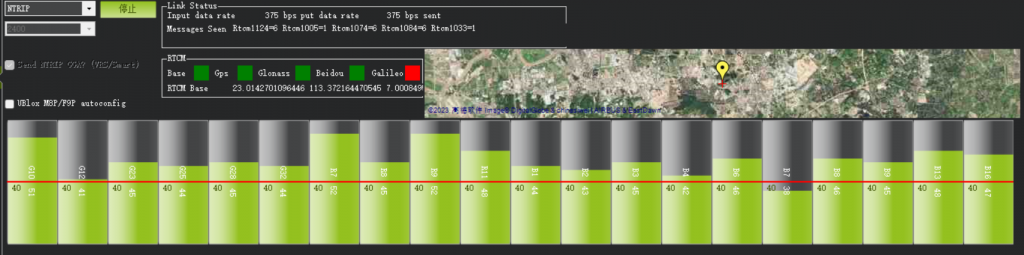
连接成功后,页面下方会出现搜索到的卫星信息,如下设置基站参数;
SurveyIn Acc(m):表示基站的基准定位精度,数值设置越小,收敛时间会越长,建议设置3~5m即可;
Time(s):表示等待达到定位精度的时间,一般设置60s即可,如果定位精度已经收敛到设定参数,但是时间没有到60S的话,基站会等待时间到了之后再进入正常工作;然后点击“Restart”按钮,开始进入RTK基站搜星过程;
如重新修改了定位精度与时间参数,修改后还需要点击该按钮,参数才能生效;
设置页面右边“Survey In”信息框里,会显示当前基站的定位信息状态,时间计数会以1S频率增长;
等待第一行文字变为绿色,出现“Position is valid”字符串和经纬高信息后,即表示基站完成搜星定位,进入正常工作状态;
注意:
飞行器在飞行的过程中,不能修改定位精度和时间参数,不能点击“Restart”按钮,否则会导致飞行器的RTK定位失效;
周围遮挡搜索卫星严重的话,会增加基站定位的时间和准确度,应将基站架设在开阔地方;
基站开始搜星定位及正常工作之后,不能挪动基站天线,应保持在一个固定位置;

基站搜星定位完成后,点击地面站右上角连接飞控,地面站与飞控会建立起通信链路(应使用无线数传方式连接);
地面站软件会通过通信链路将地面基站原始RTCM数据流发送到飞控,飞控上的天空端模块即可接收到数据,然后进入到RTK定位模式;
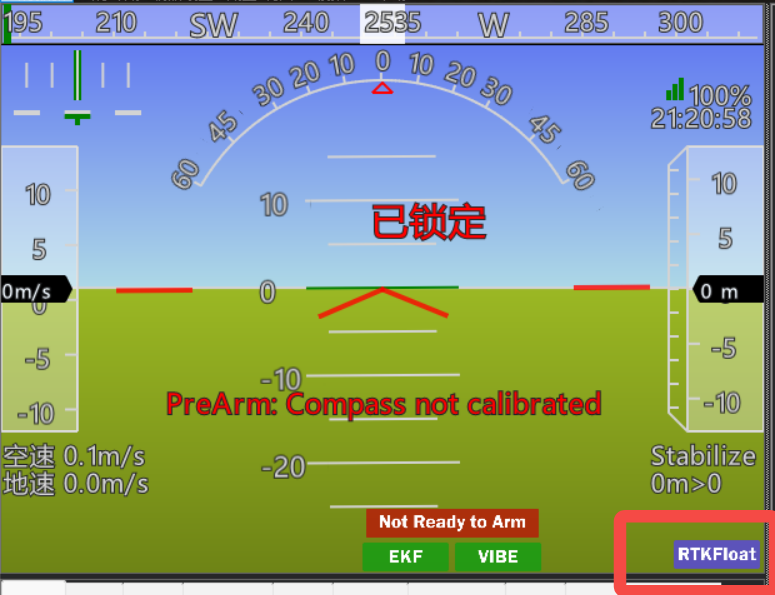
在Mission planner地面站首页查看定位信息,如下图实例右下角信息所示,天空端模块已进入RTK Float定位模式;
网络RTK基站
Mission planner地面站支持网络RTK基站功能(NTRIP协议),是指不需要直接连接基站设备,依赖互联网基站服务商提供的网络RTK基站服务;
打开设置页面(初始设置->可选硬件->RTK/GPS Inject),选择NTRIP选项,点击“连接”按钮,弹出URL格式输入账号密码信息;
URL格式:
http://用户名:密码@服务IP:服务端口/源节点
这些信息在购买CORS账号的时候都会有提供。可以在淘宝搜索“CORS账号”,一般服务商有:千寻、中国移动、华测等
例如:
账号: qxcorsh0036659 密码: 31a4056
①IP:203.107.45.154
②端口:8003对应CGCS2000坐标系,8002端口对应WGS84坐标系,记得中央子午线改成当地
③源节点:
AUTO(五星十六频,推荐五星仪器以上使用)
RTCM32_GGB(三星八频,推荐三星仪器使用)
RTCM30_GG(双星仪器使用)
因为Ardupilot采用WGS84坐标系,所以CORS账号的端口号应设置为8002
RNOTE 3 Ultra天空端模块采用了Ublox ZED-F9P模块,因此源节点选择RTCM32_GGB
那么URL信息即下面所示:
http://qxcorsh0036659:31a4056@203.107.45.154:8002/RTCM32_GGB
注意:地面站电脑需要连接互联网才能使用这项功能。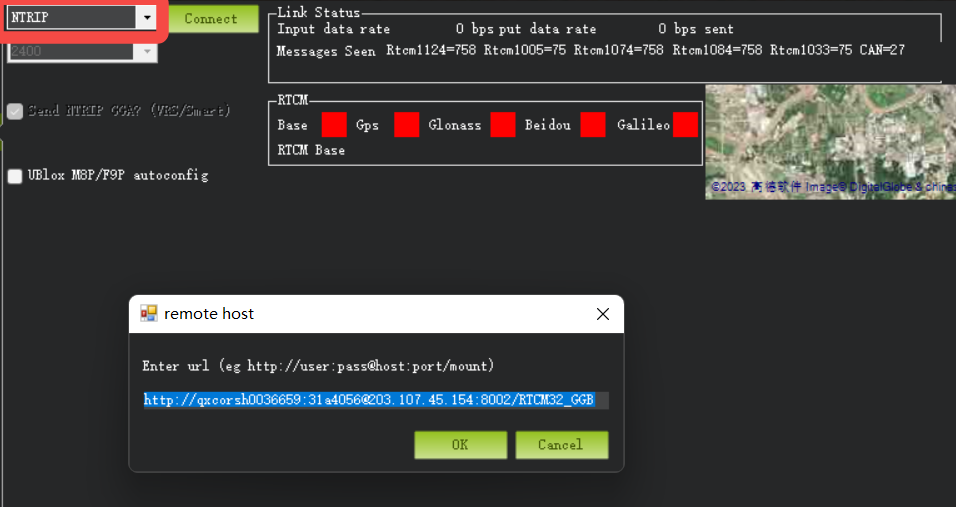
出现基站信息即表示可以正常使用,现在连接地面站与飞控的通信链路即可。
模块内置电子罗盘使用
每个RNOTE 3 Ultra模块都内置了一个RM3100工业级电子罗盘芯片,可以为飞行器提供地磁测量信息;
RNOTE 3 Ultra模块默认会输出磁罗盘的信息,无需单独配置该功能,只需要按照上面的应用场景设置好后,飞控就能够接收到该地磁数据;
如下图,地面站的指南针页面就会出现一个/两个UAVCAN的电子罗盘;
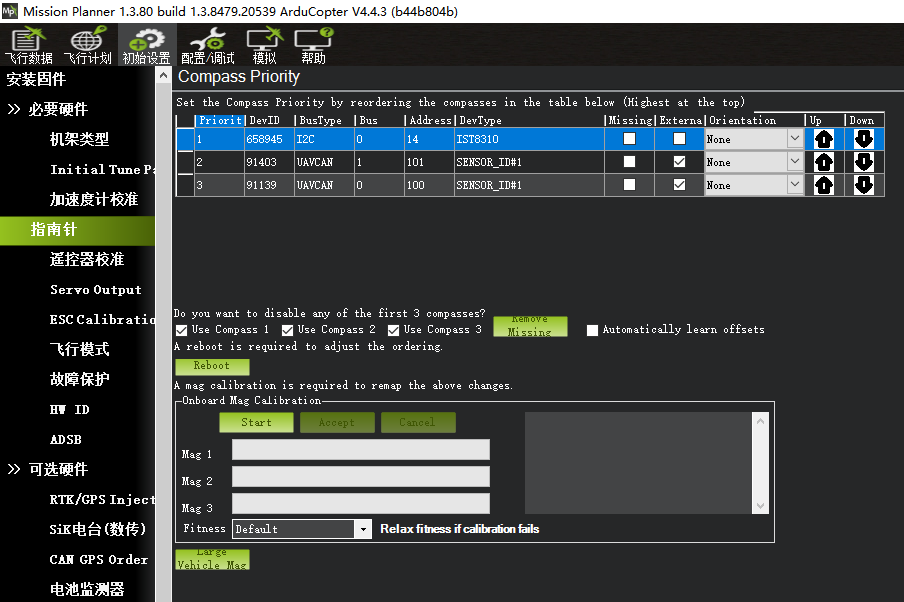
电子罗盘的校准请参考文章电子罗盘高级设置;
PX4固件
前提条件:PX4固件运行需要飞控确保插入SD卡。
样例说明基于QGC地面站的版本是4.2。
单天空端应用
使用一个RNOTE 3 Ultra模块用于单天空端时,将该模块CAN接口接入到飞控的CAN1/CAN2通信接口;
默认情况下PX4固件已经自动开启UAVCAN设备识别的,如果没有正常识别出来,检查飞控参数配置,UAVCAN_ENABLE = Sensors Automatic Config,设置完参数后重新上电。
正常情况下,能够自动识别出来GPS协议类型,如果没有正常识别,检查飞控的GPS相关参数,设置GPS_1_PROTOCOL = u-blox。

一切检查完毕,主界面能够看到搜索到的卫星信息。
注意:
RNOTE 3 Ultra支持RTK定位功能,如还需RTK定位,则应搭配地面端基站进行使用;
RNOTE 3 Ultra可用作架设地面端基站;
双天空端应用
使用两个RNOTE 3 Ultra模块作为双天空端时,可以实现双GPS功能(双GPS互为冗余);
默认情况下PX4固件已经自动开启UAVCAN设备识别的,如果没有正常识别出来,检查飞控参数配置,UAVCAN_ENABLE = Sensors Automatic Config,设置完参数后重新上电。
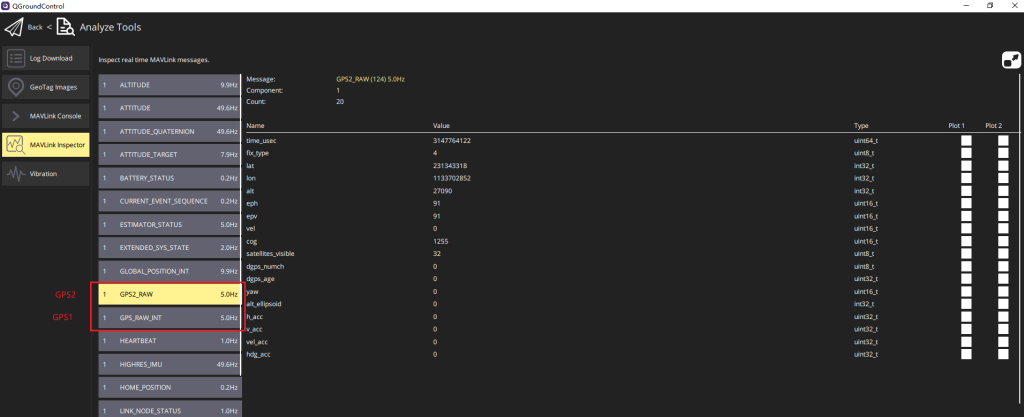
在地面站首页可以看到GPS1的搜星状态,打开MAVLink Inspector页面可以看到GPS1和GPS2更详细的原始状态信息,如下图所示;
注意:
在使用双GPS功能的同时,还可以使用RTK基站的功能;
如还需RTK定位,则应搭配地面端基站进行使用,请参考地面端基站;
地面端基站应用
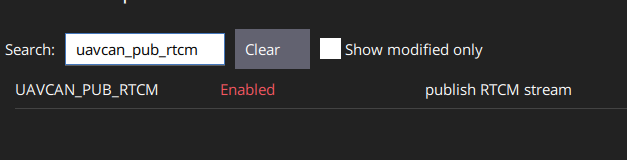
首先检查飞控参数列表,UAVCAN_PUB_RTCM参数是Enabled,默认一般是Enabled。
不要连接RNOTE 3 Ultra模块,先打开QGroundControl地面站,。
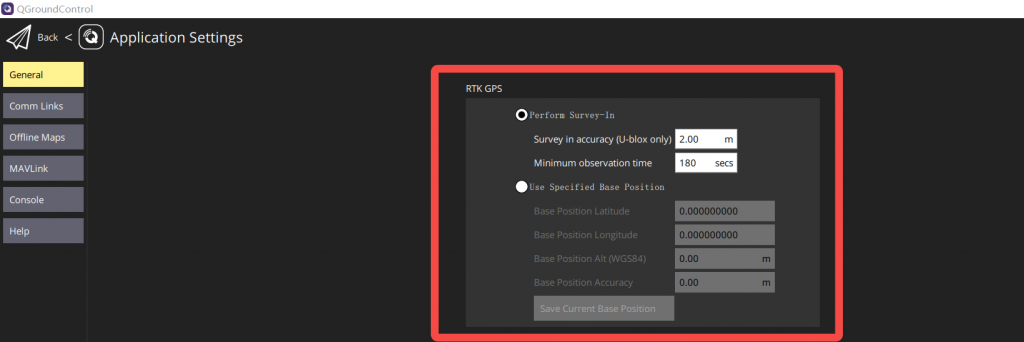
进入“Application Settings”界面,“General”选项卡,下拉看到RTK GPS功能框,默认已经有参数,如果需要改变基准精度和最小等待时间,修改后重启地面站即可。
同样的,如果需要设定已知的基准站信息,选择输入保存后重启地面站即可。
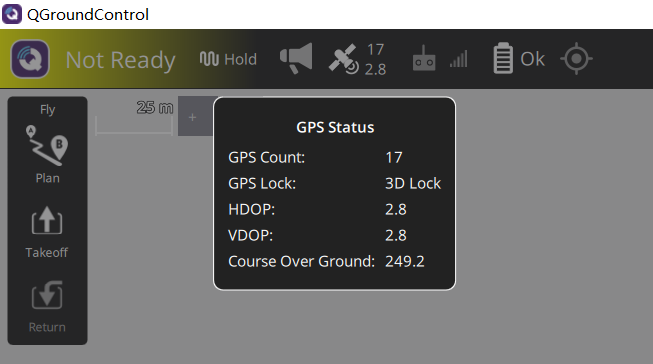
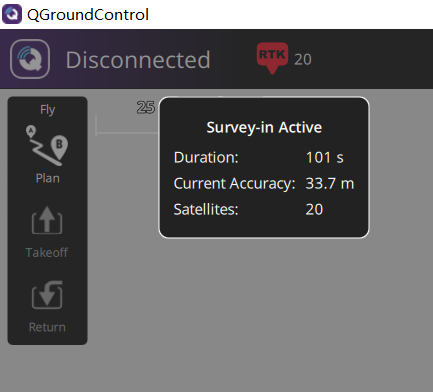
使用USB Type-C线将模块连接到电脑后,主界面会出现RTK图标,点击可以看到信息。红色图标表示定位中,图标变为白色则表示基站定位成功。
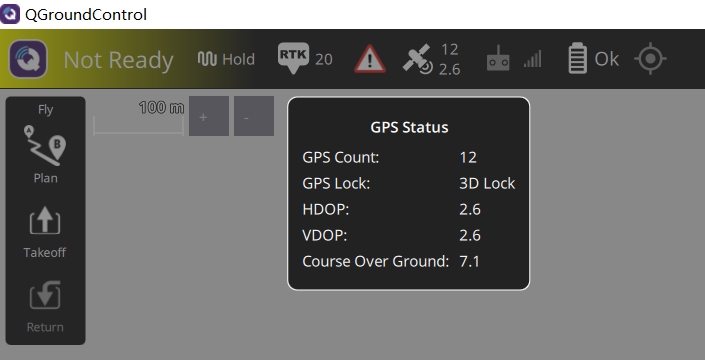
地面站连接飞控链路,查看定位信息,如果进入RTK状态,GPS Lock显示RTK Float 或 RTK Fixed。
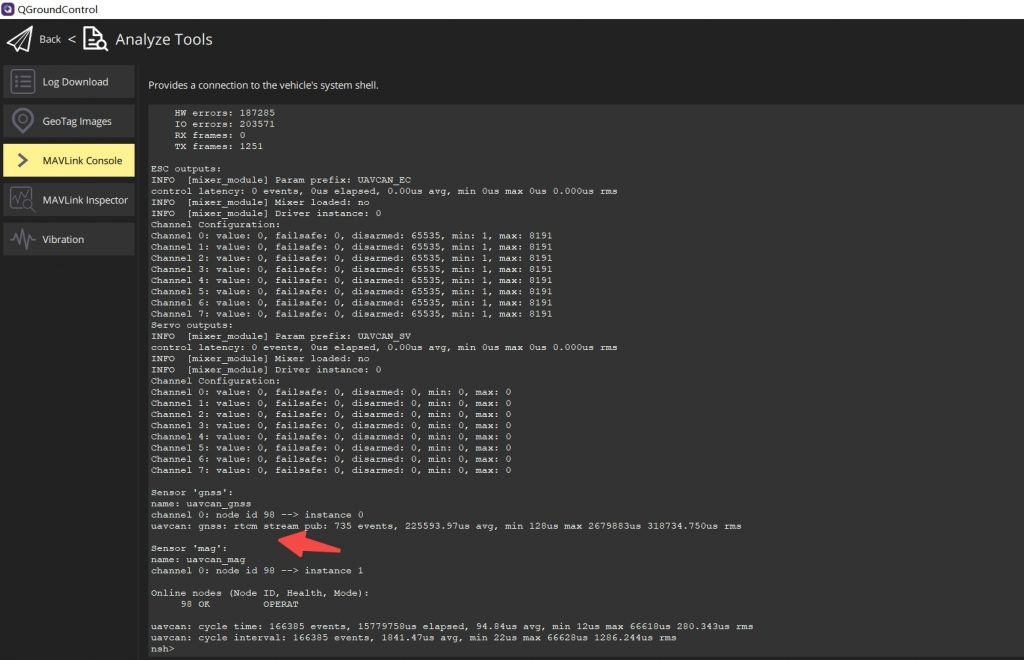
进入MAVLink控制台,输入uavcan status命令,查看是否有基站原始数据RTCM流发送到飞控。
模块内置电子罗盘使用
每个RNOTE 3 Ultra模块都内置了一个RM3100工业级电子罗盘芯片,可以为飞行器提供地磁测量信息;
模块默认会输出磁罗盘的信息,无需单独配置该功能,只需要按照上面的应用场景设置好后,飞控就能够接收到该地磁数据;
打开地面站的命令行页面,输入“sensors status”命令,可以看到新增的一个/两个电子罗盘的状态信息(数量视插入的模块个数而定),Ext表示外部电子罗盘,如下图所示;
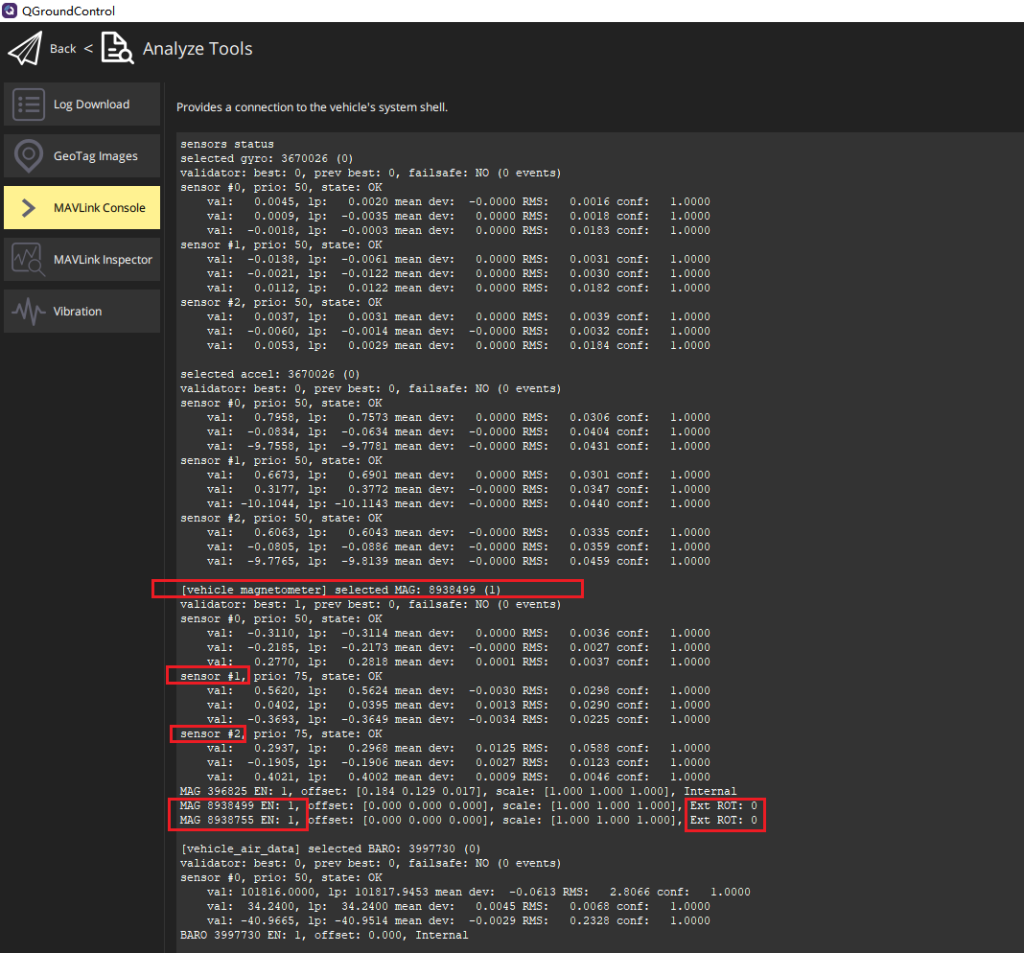
电子罗盘的校准请参考文章电子罗盘高级设置;