Ardupilot飞控
使用Mission Planner地面站软件进行数据查看及参数设置;
连接CAN模块
将CAN模块连接至飞控的CAN1或CAN2接口,然后将飞控使用usb线连接至电脑,通过地面站软件Mission Planner查看及设置CAN模块内部参数的方法有以下两种;
连接方法一,Mission planner地面站1.3.8以上版本,可以使用MAVlink方式查看DroneCAN的外设列表,无需设置飞控参数。
通过USB或数传方式连接地面站,打开页面(初始设置->可选硬件->DroneCAN/UAVCAN)。
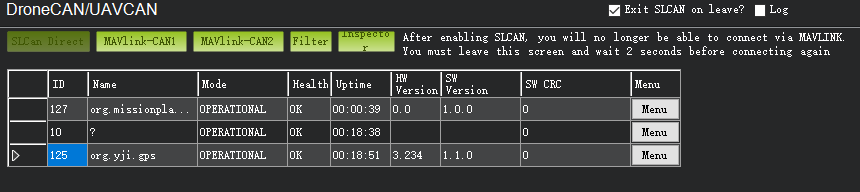
选择MAVlink-CAN1或MAVlink-CAN2,即可查看到对应CAN总线上挂载的模块设备。

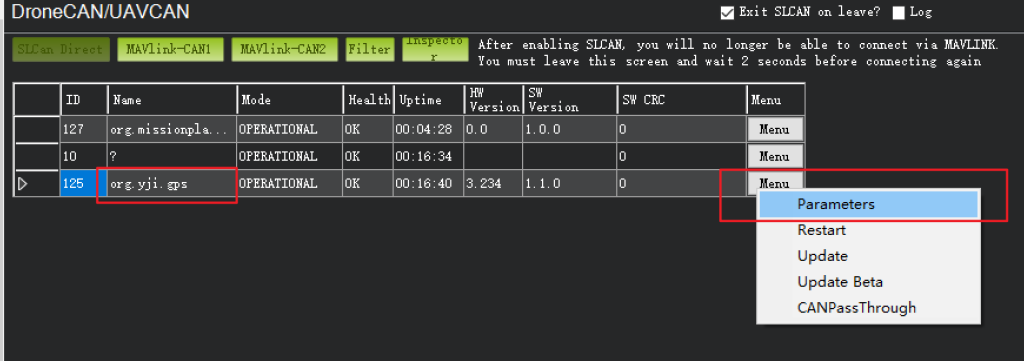
飞控会自动扫描对应CAN总线上的模块设备,扫描结果会呈现一张设备列表,点击对应的设备Menu按钮,可以进行数据查看、参数查看、参数修改、固件升级等操作。
连接方法二,使用SLCAN功能连接CAN模块;
通过USB方式连接地面站,设置以下参数,打开SLCAN功能,即可将CAN1/CAN2接口映射成USB端口。
//映射CAN1接口
CAN_SLCAN_CPORT = 1
SERIAL7_PROTOCOL = 22
//映射CAN2接口
CAN_SLCAN_CPORT = 2
SERIAL7_PROTOCOL = 22飞控断电重启,重新连接地面站时,需要选择含SLCAN字符的串口,此时不用点击连接。
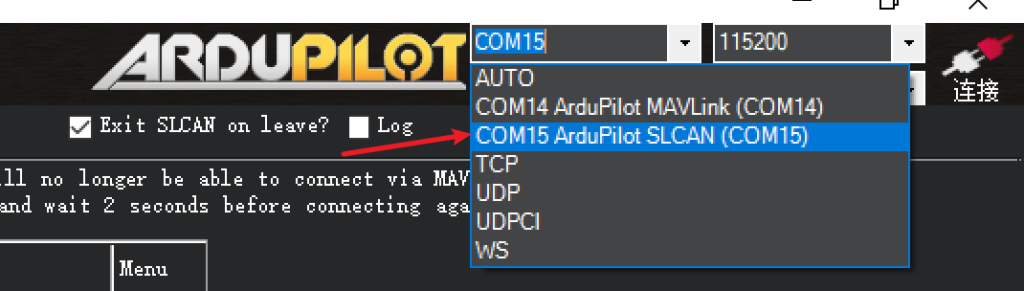
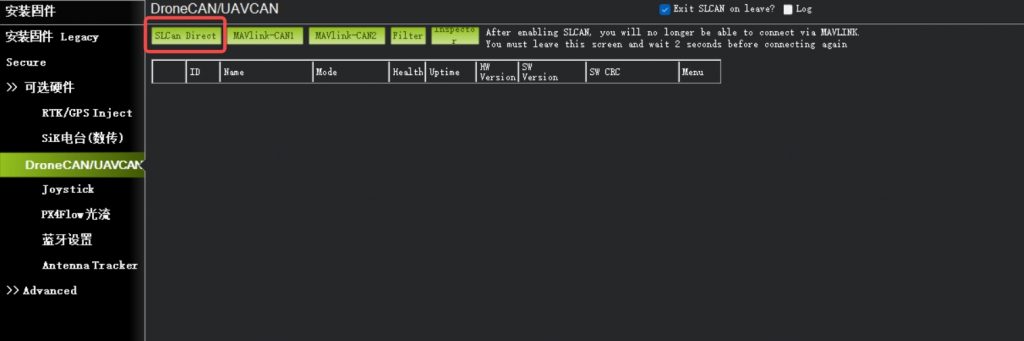
打开地面站页面(初始设置->可选硬件->DroneCAN/UAVCAN),点击SLCan Direct按钮。
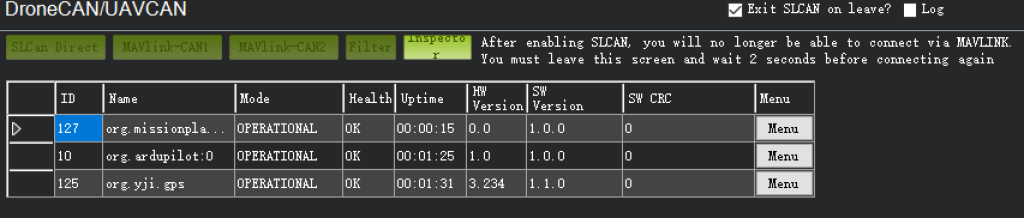
飞控会自动扫描对应CAN总线上的模块设备,扫描结果会呈现一张设备列表,点击对应的设备Menu按钮,可以进行数据查看、参数查看、参数修改、固件升级等操作。
参数设置
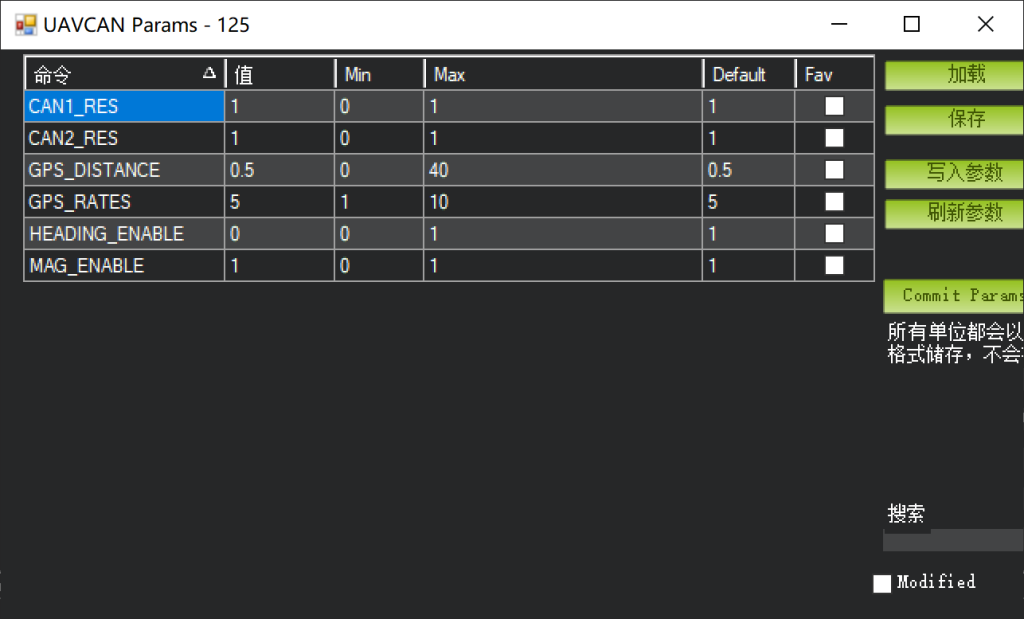
在设备列表中找到对应的CAN模块设备,点击Menu->Parameters。
打开参数设置窗口后,可以在此进行CAN模块的内部参数设置,修改完参数后,应点击写入参数以保存参数。
查看数据
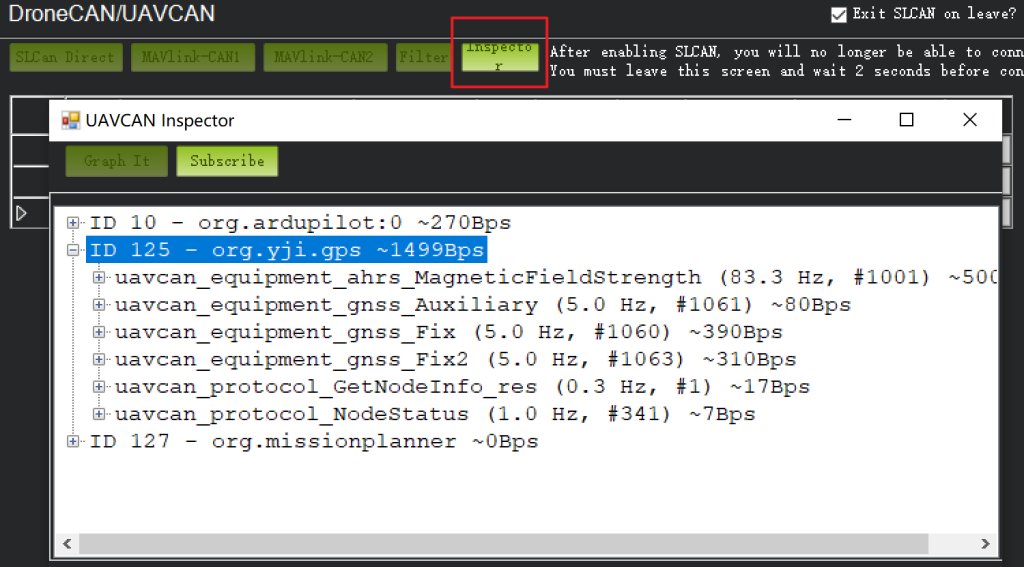
点击页面内的Inspector按钮,找到对应的CAN模块设备,即可查看CAN总线上各个设备的实时数据。
PX4飞控
使用QGoundControl地面站软件进行参数设置
设置参数
进到Vehicle Setup -> Parameters选项,参数拉到最后,可以看到CAN设备。
例如样例中是Component 125(分配125节点),点击展开可以看到设备参数,点击即可进行参数修改。
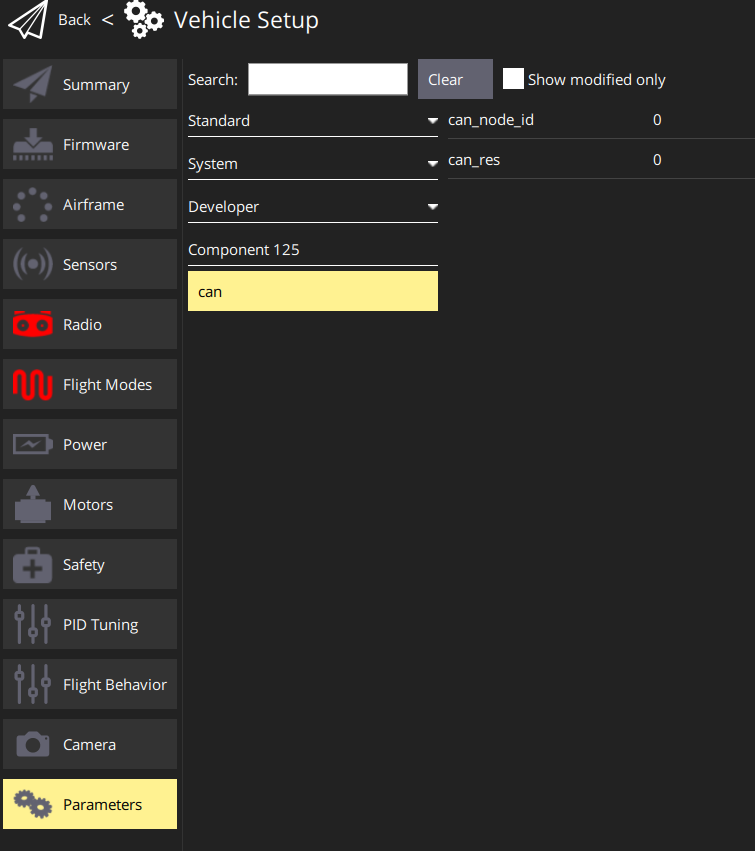
注意:目前PX4固件对于所有CAN外设,只有CAN1口才能修改设备本身参数,接入到CAN2口的无法设置。