产品概述
YJUAV NOTE 5 M10是一款基于u-blox M10高精度定位芯片的CAN接口GNSS模块,支持 DroneCAN 通信协议,信号抗干扰强;支持并发接收四种GNSS星系信号,搜星数稳定32+;内置电子罗盘IST8310,提供准确磁航向。
产品特性
- 集成u-blox M10定位芯片,功耗更低,搜星定位能力更强;
- 并发接收四种GNSS系统的信号(GPS、Galileo、GLONASS、QZSS);
- 高性能32位处理器,主频240MHz,Cortex-M4F内核,带硬件浮点运算单元;
- 内置蜂鸣器及RGB三色LED灯,使用声光效果为用户指示飞控运行状态;
- 采用DroneCAN通信协议,支持Ardupilot、PX4开源飞控;
- 内置IST8310罗盘,为飞控提供磁航向拓展;
- 内置纽扣电池,支持热启动;
采购链接
规格参数
| 规格项 | 参数值 |
|---|---|
| GNSS芯片模组 | u-blox M10 |
| GNSS频段 | GPS L1 C/A, QZSS L1 C/A/S, GLONASS L10F, Galileo E1B/C, SBAS L1 C/A: WAAS, EGNOS, MSAS, GAGAN |
| 卫星星系 | 支持并发四星系(GPS+Galileo+GLONASS+QZSS) |
| 搜星数量 | 32+ |
| 开源飞控 | 支持Ardupilot、PX4 |
| 工作电压 | 4.5V~5.5V |
| 工作电流 | 50mA(5V工作电压) |
| 处理器 | Cortex -M4F内核,240 MHz工作频率 |
| 操作系统 | ThreadX硬实时操作系统 |
| 水平定位精度 | 1.5m |
| 速度测量精度 | 0.05m/s |
| 通信接口 | CAN通信,DroneCAN协议 |
| 蜂鸣器 | 支持 |
| RGB三色灯 | 支持 |
| 电子罗盘传感器 | IST8310 |
| 冷启动时间 | 28秒 |
| 热启动时间 | 1秒 |
| 导航更新频率 | 5Hz(默认)~25Hz(最大),可参数设置 |
| 工作温度 | -40℃~+85℃ |
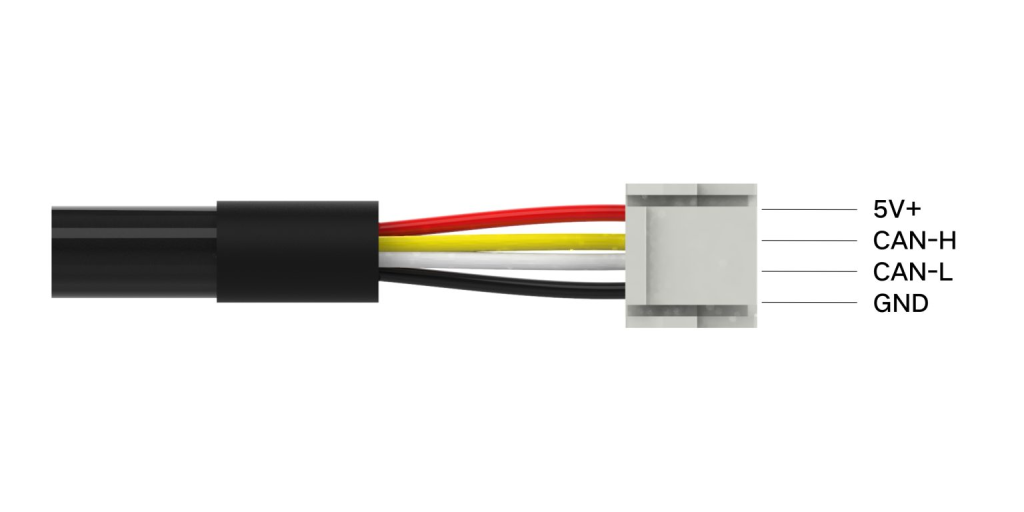
| 接口连接器 | JST GH1.25 4Pin |
| 出线线长 | 25cm |
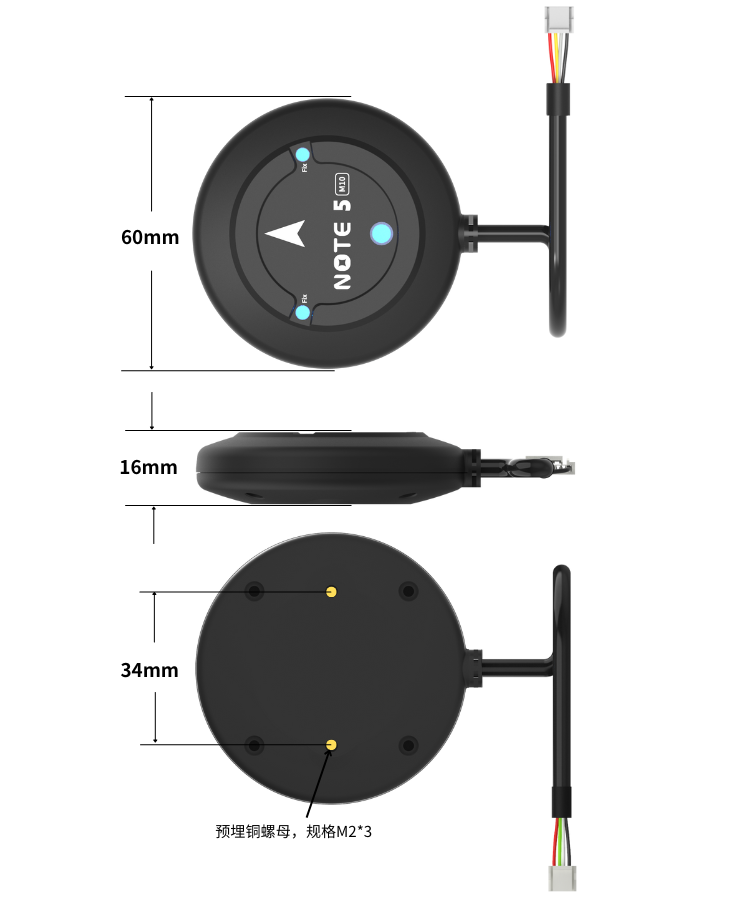
| 外形尺寸 | 直径60mm,高度16mm |
| 重量 | 45g |
产品尺寸
接口说明
使用说明
在开源飞控中使用该模块,将模块接入到飞控的CAN1/CAN2接口,设置飞控参数后即可正常使用。
模块安装
本模块有两种安装方式:
一种是使用附赠的双面胶将模块粘贴在所需位置/GPS支架上;
另一种是使用两个M2的螺丝将模块固定在无人机上,螺丝安装孔距见产品尺寸图;
注意:模块安装时,需要将模块正面的箭头方向与无人机的前向方向对齐;
Ardupilot飞控设置
使用前,需要设置飞控打开CAN总线通信功能;
//如模块接入CAN1接口,则打开CAN1通信功能 CAN_P1_DRIVER = 1 CAN_D1_PROTOCOL = 1 //如模块接入CAN2接口,则打开CAN2通信功能 CAN_P2_DRIVER = 1 CAN_D2_PROTOCOL = 1
开源飞控支持主从双GPS,在使用本模块时,用户可根据下面使用情况进行飞控参数配置。
如果单模块使用,当做主GPS时,需配置飞控参数GPS_TYPE = 9;
如果单模块使用,当做从GPS时,需配置飞控参数GPS_TYPE2 = 9;
如果双模块使用,用作双GPS功能时,需配置飞控参数GPS_TYPE = 9和GPS_TYPE2 = 9;
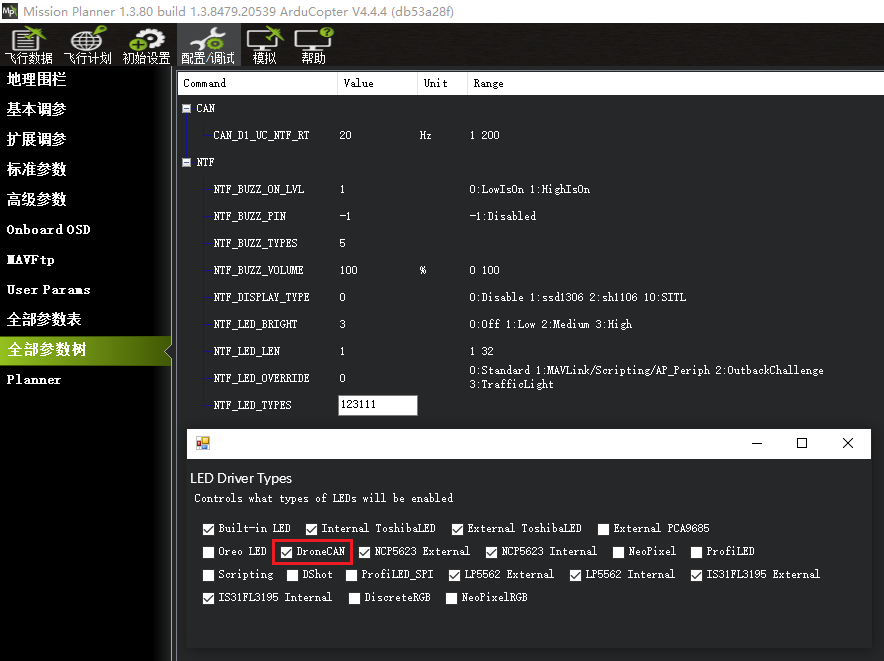
设置使用模块的RGB灯时,需修改飞控参数NTF_LED_TYPES,将DroneCAN选项勾选上,如下图所示;
以上修改完后,断电重启飞控;
模块上电后,会听到蜂鸣器的响声,同时模块正面的RGB灯会跟随飞控的灯同时闪动;
飞控重新连接上位机,在上位机首页中的仪表信息中可以看到出现的GPS信息;
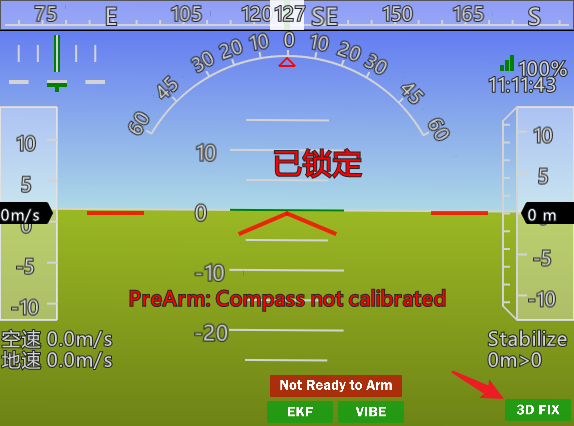
无GPS(NO GPS)-- 表示飞控没有识别出来正确的GPS,需要检查硬件连接和参数设置
未定位 (NO Fix)-- 已经识别GPS设备,但没有搜索到卫星
2D定位 (2D Fix)-- 已经有少数卫星定位状态
3D定位 (3D fix)-- 已经很好的卫星定位状态
3D DGPS -- 最好的单点定位状态
RTK浮点解定位(RTK Float)-- 表示达到普通得RTK定位,需要有RTK基站端搭配才会显示RTK定位
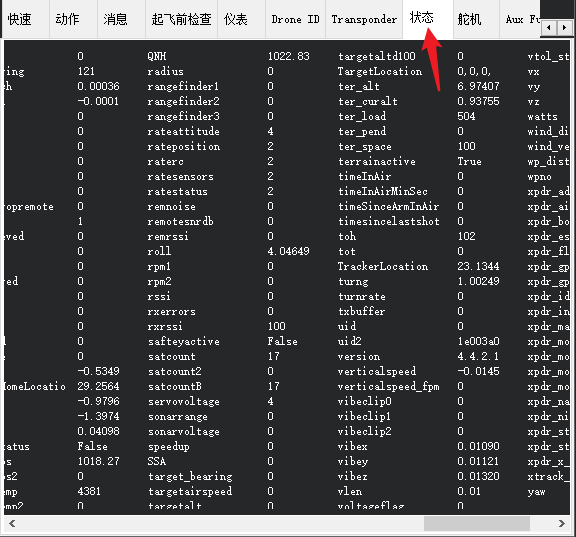
RTK固定解定位(RTK Fixed)-- 表示达很好的RTK定位,需要有RTK基站端搭配才会显示RTK定位如需了解GPS模块的更多状态信息,需打开上位机首页的状态页面;
主要观察以下状态数据,satcount(搜星数量)、gpsh_acc(水平定位精度,单位m)、gpsv_acc(垂直定位精度,单位m)、gpshdop(水平定位精度因子);
模块内置了一个电子罗盘IST8310,在指南针页面(初始设置->必要硬件->指南针)中可以看到该设备信息,如下图;

PX4飞控设置
使用前需要设置以下飞控参数:
//使能CAN总线上传感器自动配置
UAVCAN_ENABLE = Sensors Automatic config
//设置订阅CAN总线上的GPS数据
UAVCAN_SUB_GPS = Enable
//设置订阅CAN总线上的磁力计数据
UAVCAN_SUB_MAG = Enable设置完参数,连接GPS模块,飞控重新上电;
模块会发出蜂鸣器的提示声,模块表面上的RGB状态指示灯也在闪动;
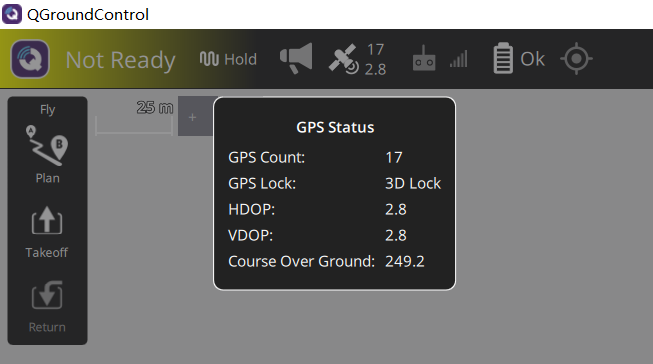
在QGC上位机主界面能够看到模块搜索到的卫星信息;
模块内部参数
模块所有参数见下表:
| 参数名 | 默认值 | 参数值范围 | 参数说明 |
|---|---|---|---|
| CAN_HW_BAUD | 1000000 | 100000、125000、250000、500000、800000、1000000 | 模块CAN接口通信波特率,默认为1Mbps(1000000); |
| CAN_HW_RES | -1 | -1(自适应)、0(关闭)、1(打开) | 模块内部终端电阻开关与否,-1代表根据总线情况自适应终端电阻开关; |
| CAN_ID | 0 | 0~127 | 设定模块ID,0代表由Dronecan协议自动分配ID; |
| BUZZER_ENABLE | 1 | 0(关闭)、1(打开) | 蜂鸣器功能使能; |
| MAG_ENABLE | 1 | 0(关闭)、1(打开) | 电子罗盘功能使能; |
| RGB_ENABLE | 1 | 0(关闭)、1(打开) | RGB灯功能使能; |
| GPS_ENABLE | 1 | 0(关闭)、1(打开) | GPS定位功能使能; |
| GPS_RATES | 5 | 5~10 | GPS消息速率,单位Hz; |
CAN模块内部参数查看及设置方法,请参考文章“DroneCAN模块查看及设置内部参数”;