产品概述
YJUAV NOTE 2是一款基于u-blox M8N模组的高性价比通用型GNSS模块,具有小体积、低成本、高灵敏度等优点。

产品特性
- 集成了u-blox NEO-M8N定位模组;
- 支持并发两星系(GPS+GLONASS);
- 内置电子罗盘传感器芯片,可以测量设备磁航向;
- 内置RGB三色LED灯,能够指示飞控的状态信息;
- 内置纽扣电池,支持热启动;
采购链接
规格参数
| 规格项 | 参数值 |
|---|---|
| GNSS芯片模组 | u-blox NEO-M8N |
| GNSS频段 | GPS L1C/A, SBAS L1C/A, QZSS L1C/A, QZSS L1 SAIF, GLONASS L1OF, BeiDou B1I, Galileo E1B/C |
| 卫星星系 | 支持并发两星系(GPS+GLONASS) |
| 搜星数量 | 20+ |
| 开源飞控 | 支持Ardupilot、PX4 |
| 工作电压 | 4.5V~5.5V |
| 工作电流 | 50mA(5V工作电压) |
| 水平定位精度 | 2.5m |
| GNSS芯片通信 | 串口通信,NMEA协议或UBLOX协议 |
| RGB三色灯驱动芯片 | NCP5623,I2C接口 |
| 电子罗盘传感器 | IST8310,I2C接口 |
| 冷启动时间 | 26秒 |
| 热启动时间 | 1秒 |
| 导航更新频率 | 10HZ(最大) |
| 工作温度 | -20℃~+60℃ |
| 出线线长 | 25cm |
| 外形尺寸 | 直径60mm,高度16mm |
| 重量 | 42.2g |
产品尺寸

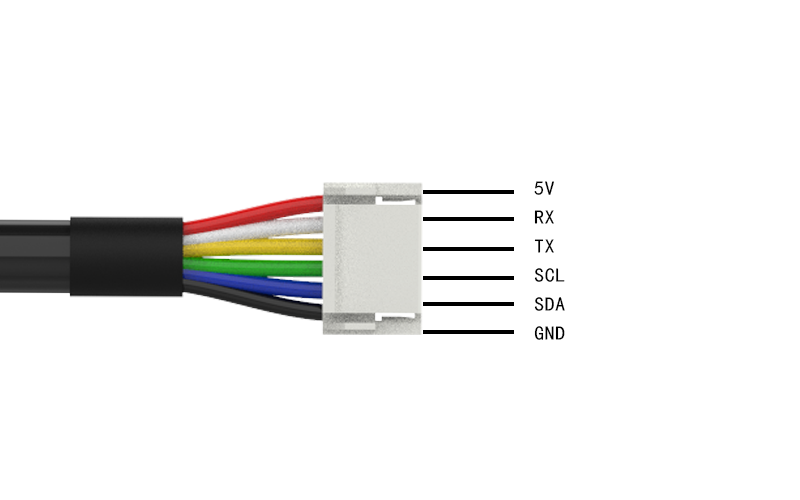
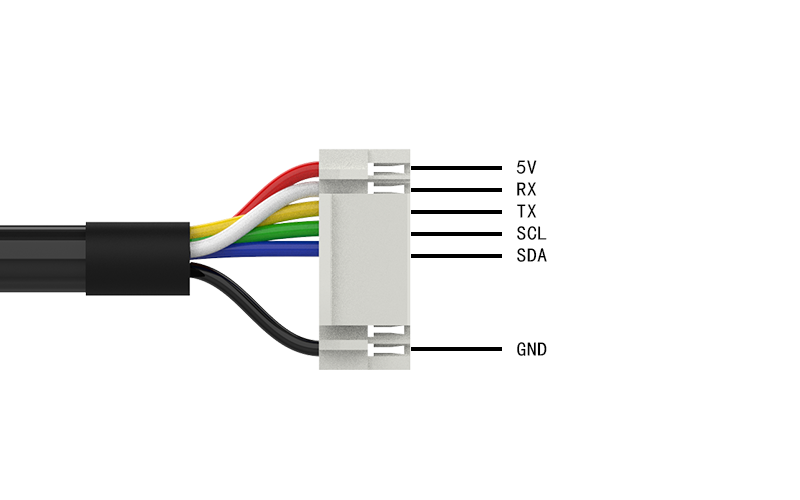
接口说明
NOTE 2模块兼容了pixhawk接口标准,有两个版本,分别是6Pin版本和10Pin版本。
使用说明
在开源飞控中使用该模块,插上GPS接口,设置GPS配置参数后即可正常使用。
模块安装
本模块有两种安装方式:
一种是使用附赠的双面胶将模块粘贴在所需位置/GPS支架上;
另一种是使用两个M2的螺丝将模块固定在无人机上,螺丝安装孔距见产品尺寸图;
注意:模块安装时,需要将模块正面的箭头方向与无人机的前向方向对齐;
Ardupilot飞控设置
开源飞控一般支持接入主、从双GPS,在使用本模块时,用户可根据下面使用情况进行飞控参数配置。
如果模块接入到飞控的GPS1接口,则此时模块作为主GPS使用,需配置飞控参数GPS_TYPE = 1;
如果模块接入到飞控的GPS2接口,则此时模块作为从GPS使用,需配置飞控参数GPS_TYPE2 = 1;
设置完参数后,重启飞控;
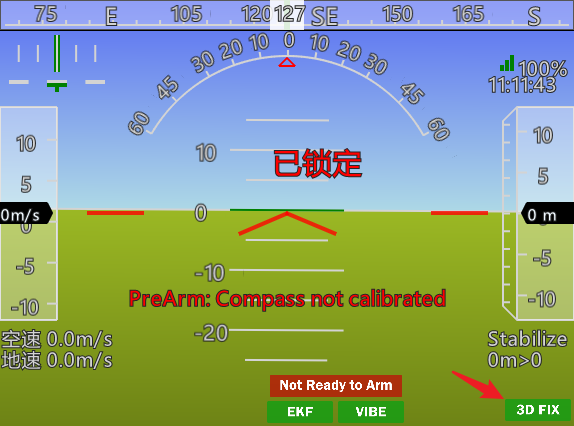
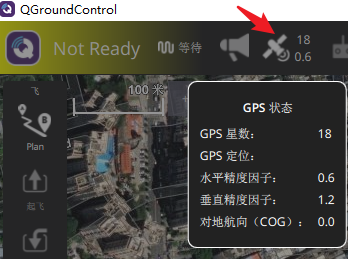
如上图,重新连接上位机后,在首页可以看到GPS模块的定位状态;
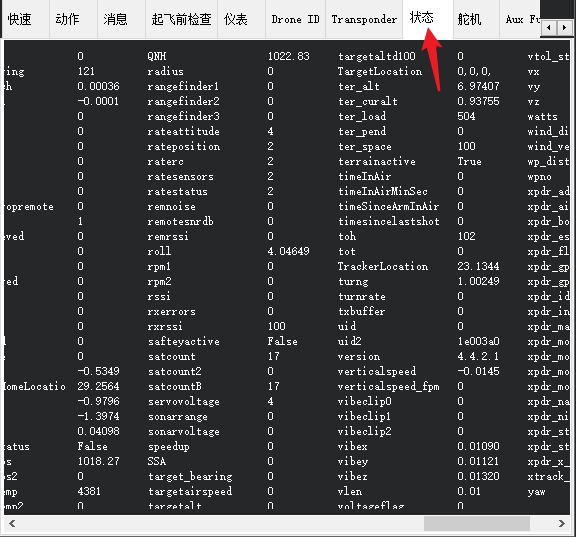
如需了解GPS模块的更多状态信息,需打开上位机首页的状态页面;
主要观察以下状态数据,satcount(搜星数量)、gpsh_acc(水平定位精度,单位m)、gpsv_acc(垂直定位精度,单位m)、gpshdop(水平定位精度因子);
PX4飞控设置
开源飞控一般支持接入主、从双GPS,在使用本模块时,用户可根据下面使用情况进行飞控参数配置。
如果模块接入到飞控的GPS1接口,用作主GPS时,则需配置飞控参数GPS_1_CONFIG = GPS1,GPS_1_PROTOCOL = u-blox;
如果模块接入到飞控的GPS1接口,用作从GPS时,则需配置飞控参数GPS_2_CONFIG = GPS1,GPS_2_PROTOCOL = u-blox;
如果模块接入到飞控的GPS2接口,用作主GPS时,则需配置飞控参数GPS_1_CONFIG = GPS2,GPS_1_PROTOCOL = u-blox;
如果模块接入到飞控的GPS2接口,用作从GPS时,则需配置飞控参数GPS_2_CONFIG = GPS2,GPS_2_PROTOCOL = u-blox;
设置完参数后,重启飞控;
如上图,重新连接上位机,在首页可以看到GPS模块的定位状态;
如果该模块是用于其他用途,则需要了解NEO-M8N、NCP5623、IST8310这三个芯片的技术文档手册,开发对应的驱动程序才能使用。