产品概述
YJUAV CAN TOF20是一款CAN接口远距离测距传感器,测距量程0.2m~20m;集成高灵敏红外增强光电传感器,抗环境光能力强,具备温度补偿功能;适用于无人机、无人车的测距测高以及避障场景;采用标准DroneCAN协议,支持开源Ardupilot、PX4飞控即插即用;
产品特性
- 硬实时操作系统ThreadX,高效安全;
- 测距量程0.2m~20m,100Hz高速输出测距DroneCAN报文;
- 集成高灵敏红外增强光电传感器,具备反射率校准功能,抗环境光能力强,具备温度补偿功能;
- 采用标准DroneCAN协议,支持开源Ardupilot、PX4飞控即插即用;
- 参数配置开关设备终端电阻,自动适应CAN总线设备挂载方式;
采购链接
规格参数
| 规格项 | 参数值 |
|---|---|
| 处理器 | STM32F3 主频72Mhz |
| 传感器 | 红外SPAD传感器 |
| 实时系统 | ThreadX |
| 数据速率 | 100Hz |
| 测距范围 | 0.2m~20m |
| 测距精度 | ±2cm(0.2m~6m),±1%(>6m) |
| 抗强光 | 12m 100Klux |
| 温度补偿 | 具备 |
| 反射率校正 | 具备 |
| 视场角 | 1.3° |
| 激光光源 | 905nm |
| 人眼安全 | Class 1 |
| 通信协议 | DroneCAN/UAVCAN |
| 飞控类型 | Ardupilot/PX4 |
| 接口类型 | GHR-04V-S |
| 工作电压 | 5V |
| 工作温度 | -20 to 50℃ |
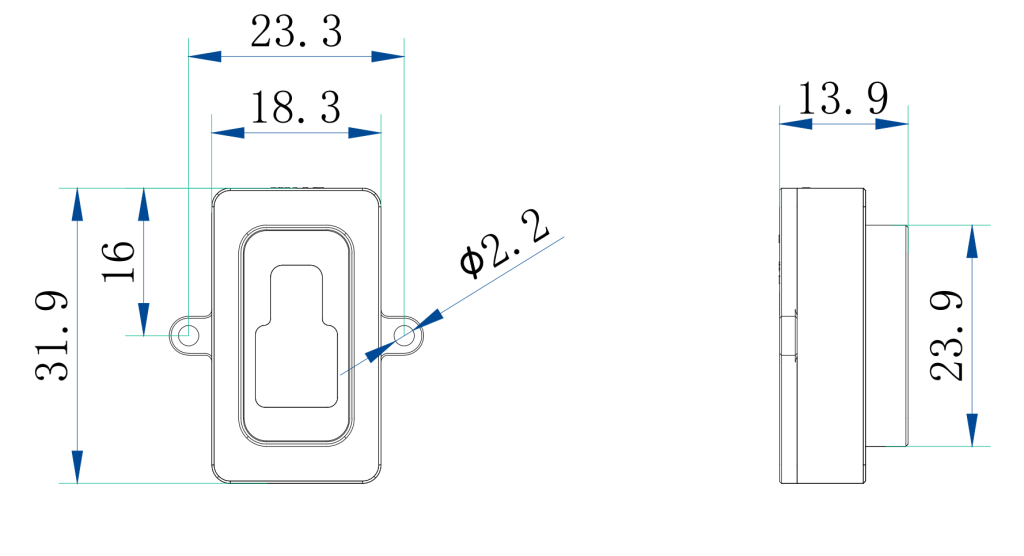
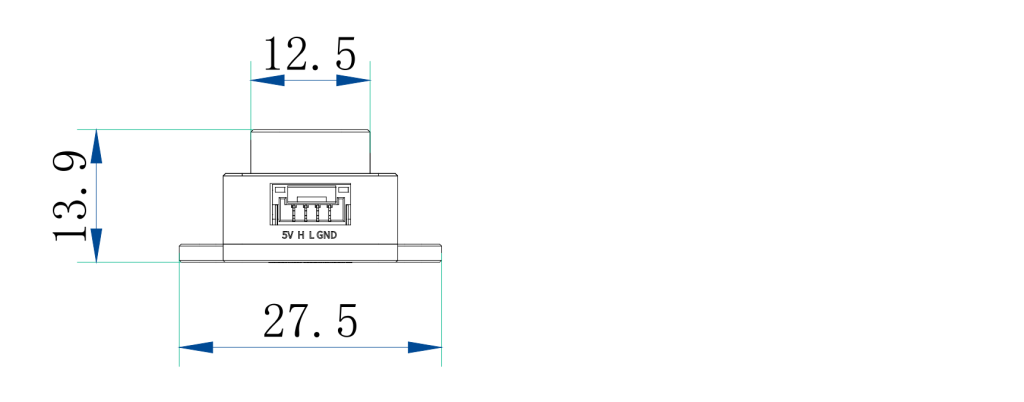
| 尺寸 | 31.9*27.5*13.9mm |
| 重量 | 9.2g |
产品尺寸
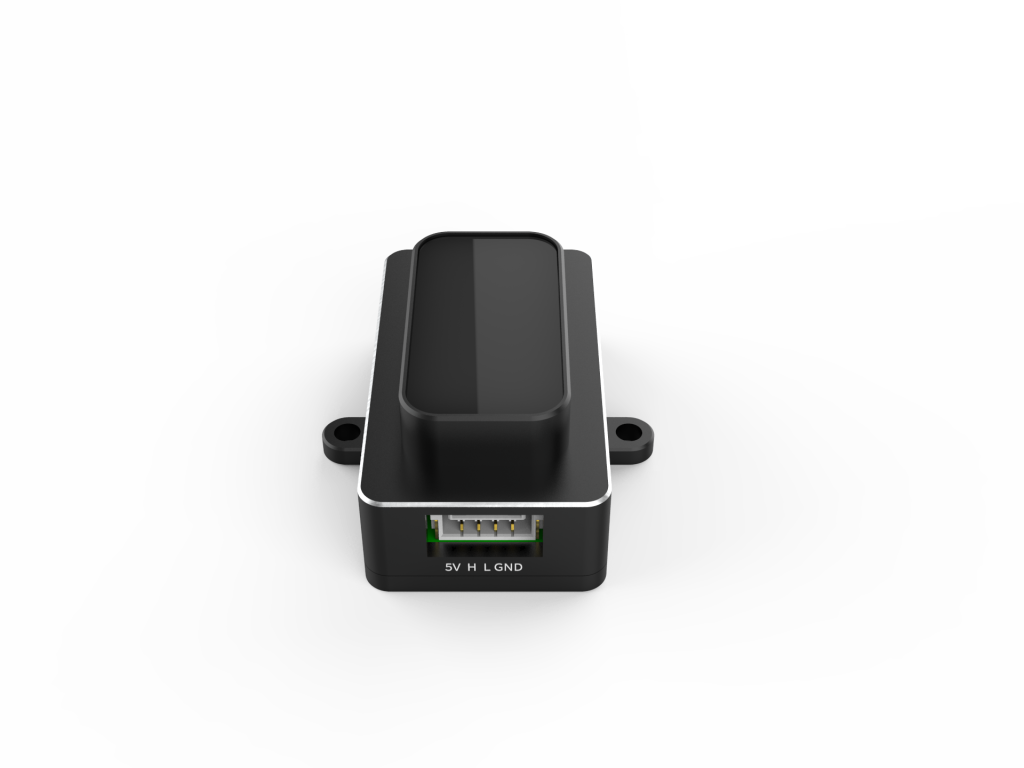
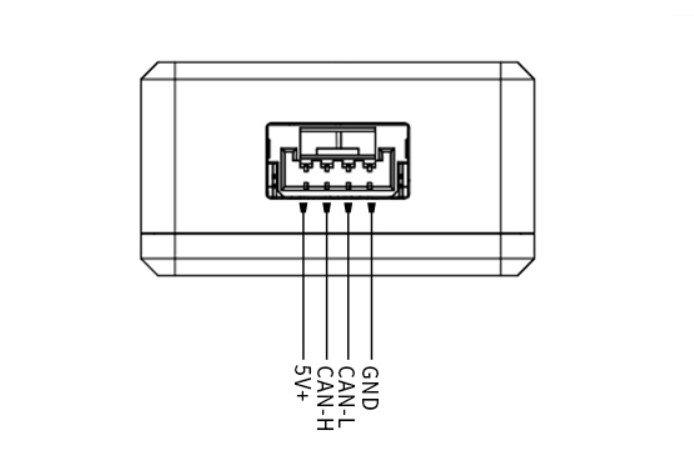
接口说明
根据接口线序接入到飞控硬件CAN通信接口即可,接口符合Pixhawk硬件定义标准;
使用说明
模块安装
模块可使用双面胶粘贴或者螺丝固定的方式固定在无人机、无人车或其他载具上;
注意:模块的测距镜面不能被障碍物遮挡,否则会导致测距不准确;
Ardupilot飞控
本测距模块既可以用于实现测距定高,又可以用于实现测距避障功能,设置方法如下;
激光测距定高参数设置
使用前,需要设置完如下飞控参数,然后断电重启飞控;
//CAN1接口
CAN_P1_DRIVER = 1
CAN_D1_PROTOCOL = 1
//CAN2接口
CAN_P2_DRIVER = 1
CAN_D2_PROTOCOL = 1
//设置测距传感器的类型、朝向和距离范围
RNGFND1_TYPE = 24
RNGFND1_MIN = 0.2
RNGFND1_MAX = 20.0
RNGFND1_ORIENT = 25
//设置测距传感器离地距离,需自行测量,值为正值,单位为m
RNGFND1_GNDCLR = ?
//设置测距模块与无人机机体中心的偏差位置,修正无人机倾角时造成的测距偏差
//这三个值需自行测量,如果只是偏差几厘米的程度,这三个值可以直接都写0
RNGFND1_POS_X = ?
RNGFND1_POS_Y = ?
RNGFND1_POS_Z = ?
//设置无人机高度参考数据来源于测距传感器数据
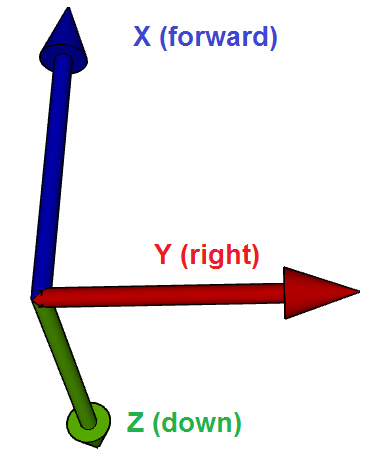
EK3_SRC1_POSZ = 2测量测距模块与无人机机体中心的偏差位置时,参考下面坐标图,无人机机体中心位于下图的原点位置;
如果测距模块位于原点前方,则X值取正,反之取反;
如果测距模块位于原点右侧,则Y值取正,反之取反;
如果测距模块位于原点下方,则Z值取正,反之取反;
激光测距避障参数设置
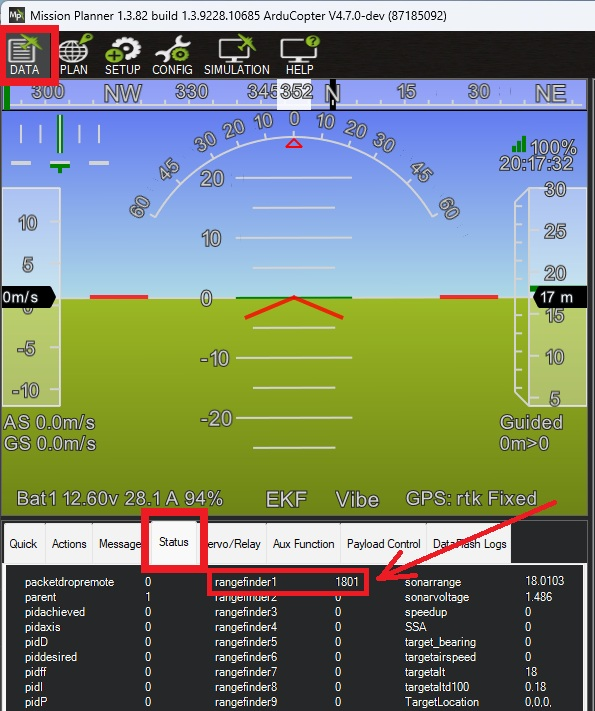
查看测距数据
PX4飞控
本测距模块既可以用于实现测距定高,又可以用于实现测距避障功能,设置方法如下;
激光测距定高参数设置
使用前,需要设置完如下飞控参数,然后断电重启飞控;
//使能CAN总线
UAVCAN_ENABLE = Sensors Automatic Config
//使能CAN总线上测距数据订阅
UAVCAN_SUB_RNG = Enabled
//设置测距距离范围
UAVCAN_RNG_MIN = 0.2
UAVCAN_RNG_MAX = 20.0
//设置测距模块与无人机机体中心的偏差位置,修正无人机倾角时造成的测距偏差
//这三个值需自行测量,如果只是偏差几厘米的程度,这三个值可以直接都写0
EKF2_RNG_POS_X = ?
EKF2_RNG_POS_Y = ?
EKF2_RNG_POS_Z = ?
//设置无人机高度参考数据来源于对地测距传感器
EKF2_RNG_CTRL = Enabled (conditional mode)
EKF2_RNG_A_HMAX = 20.0
EKF2_RNG_QLTY_T = 0.2注意:PX4固件运行需要确保SD卡已插入飞控里。
测量测距模块与无人机机体中心的偏差位置时,参考下面坐标图,无人机机体中心位于下图的原点位置;
如果测距模块位于原点前方,则X值取正,反之取反;
如果测距模块位于原点右侧,则Y值取正,反之取反;
如果测距模块位于原点下方,则Z值取正,反之取反;
激光测距避障参数设置
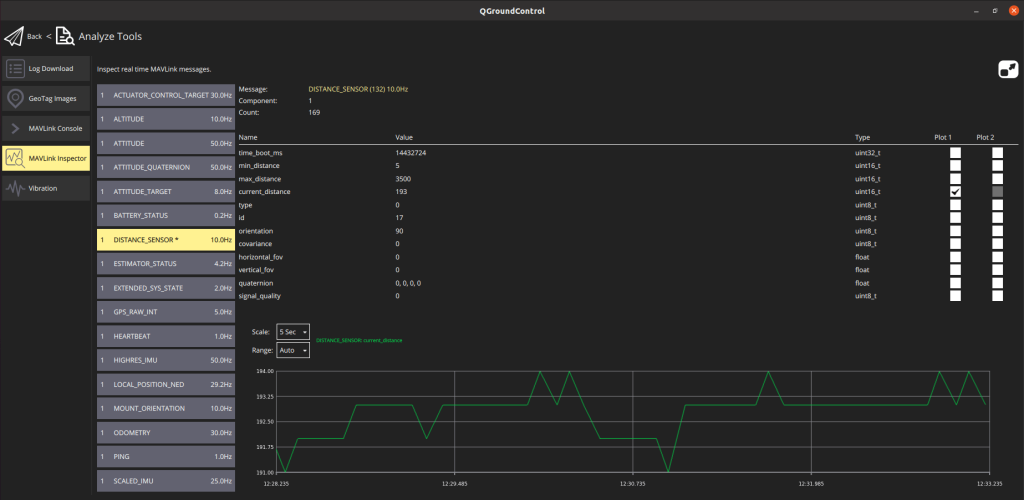
查看测距数据
进到Analyze Tools -> MAVLink Inspector,查看DISTANCE_SENSOR消息里的current_distance数值;