A6 SE飞控使用Ardupilot固件,使用Mission Planner上位机软件进行飞控设置及校准操作;
注意:在以下设置和校准的步骤中,只需要使用USB-TypeC线、A6 SE飞控和一台电脑即可完成。请不要接入电调信号线和螺旋桨,防止操作过程中电机误转动,造成伤害。
飞控固件烧录
本教程用于固定翼无人机,因此需要烧录Ardupilot的固定翼固件;
打开上位机固件烧录页面(初始配置->安装固件),使用USB-TypeC线,连接飞控和电脑;
烧录页面显示飞控的硬件ID(ID号为1141)和其他硬件信息,说明上位机已经识别到该飞控硬件板卡,可以进行接下来的操作;
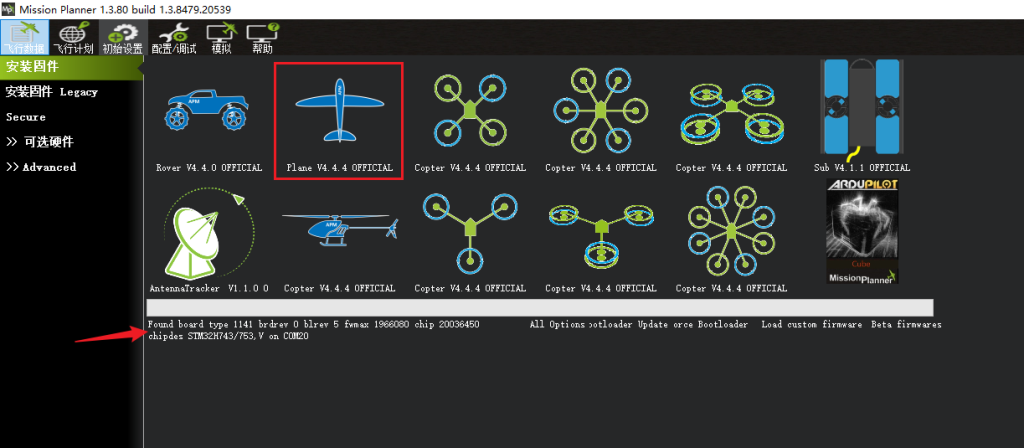
选择固定翼机型固件(Plane Vx.x.x OFFICIAL),升级官方最新固件;
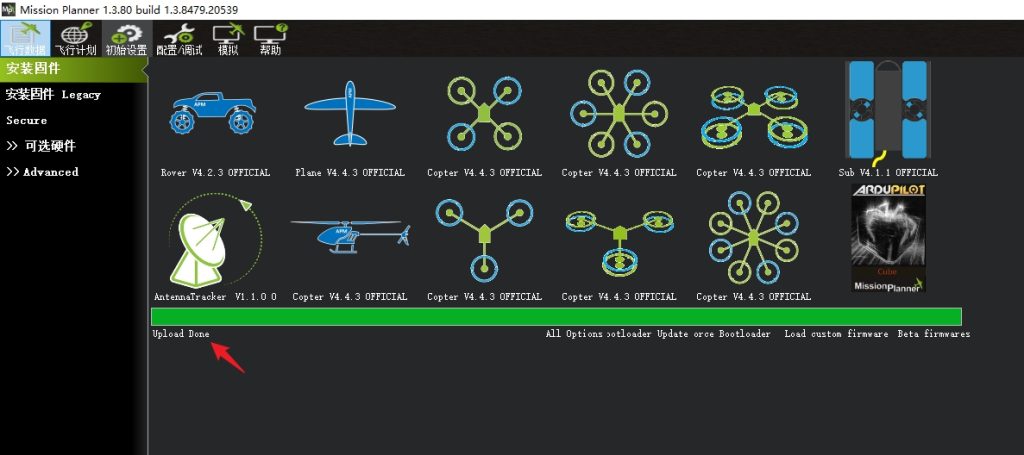
烧录完成后,会出现“Upload Done”字符,代表飞控已经可以正常使用了;
飞控参数重置
注意:如果飞控使用之前烧录过其他机型、其他飞控的固件,建议将飞控的参数重置,否则使用过程中可能会出现异常!
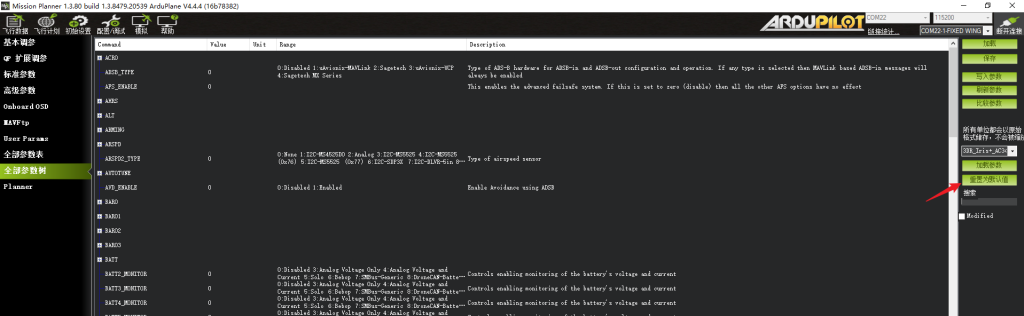
连接飞控,打开参数页面(配置/调试->全部参数树),点击“重置为默认值”按钮;
点击“Yes”按钮;
操作完后,飞控会恢复默认参数并自动重启;
加速度计校准
连接飞控,打开校准页面(初始配置->必要硬件->加速度计校准);
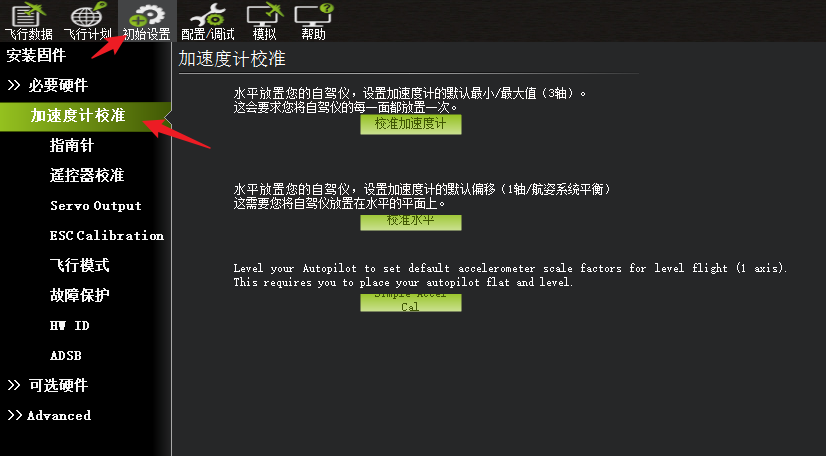
校准页面里有三种校准操作,从上到下分别是加速度六面校准、水平校准、简易水平校准三种;
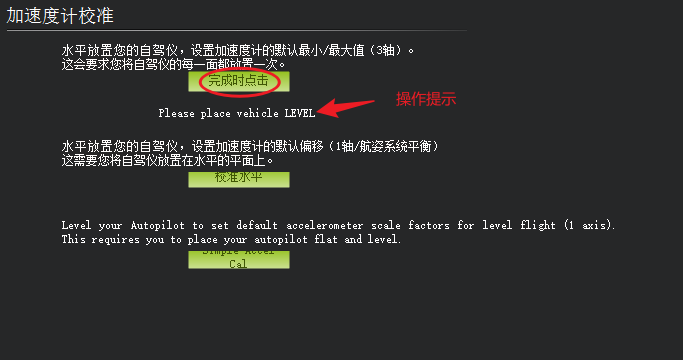
加速度六面校准:对飞控内部传感器中的加速度计进行六面校准,修正加速度测量误差;
为保障校准精度,六面校准时需要将飞控放在水平桌面上进行操作,对六个面分别进行校准;

如上图所示,飞控摆放的姿态依次为:正面朝上、正面朝左、正面朝右、机头朝下、机头朝上、正面朝下;
点击按钮“校准加速度”,根据校准界面上的操作提示依次摆放飞控的姿态,每次摆放完成后,点一下按钮“完成时请点击”,直到六个面都完成校准;
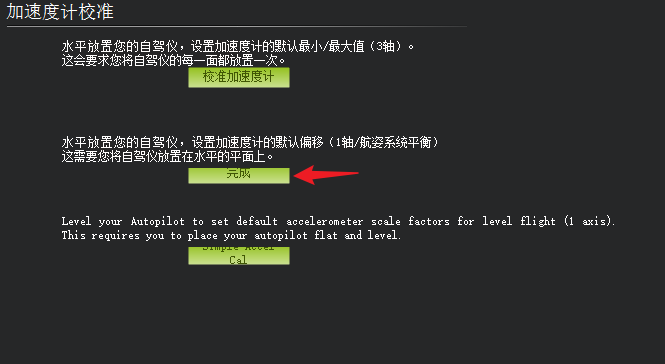
水平校准:对飞控进行水平校准,校准Z轴加速度与水平面的误差,校准姿态角度与水平面的误差;
将飞控放置水平,如果有水平仪器(水平气泡、水平仪),将水平仪器放置在飞控上面,可以得到更精准的水平;
点击“校准水平”按钮,等待几秒按钮上出现“完成”提示后,校准完成;
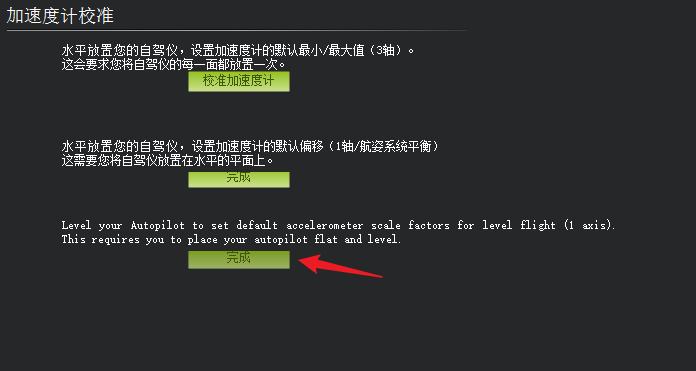
如果已经执行完水平校准,则不需要再进行简易水平校准!
简易水平校准:跟水平校准一样的校准方法,但是校准的内容更简单些,只修正Z轴加速度与水平的误差,不修正姿态的水平误差;
将飞控放置水平,点击“Simple Accel Cal”按钮,等待几秒按钮上出现“完成”提示后,校准完成;
指南针校准
打开指南针校准页面(初始设置->必要硬件->指南针),点击“Start”按钮开始进行指南针校准;
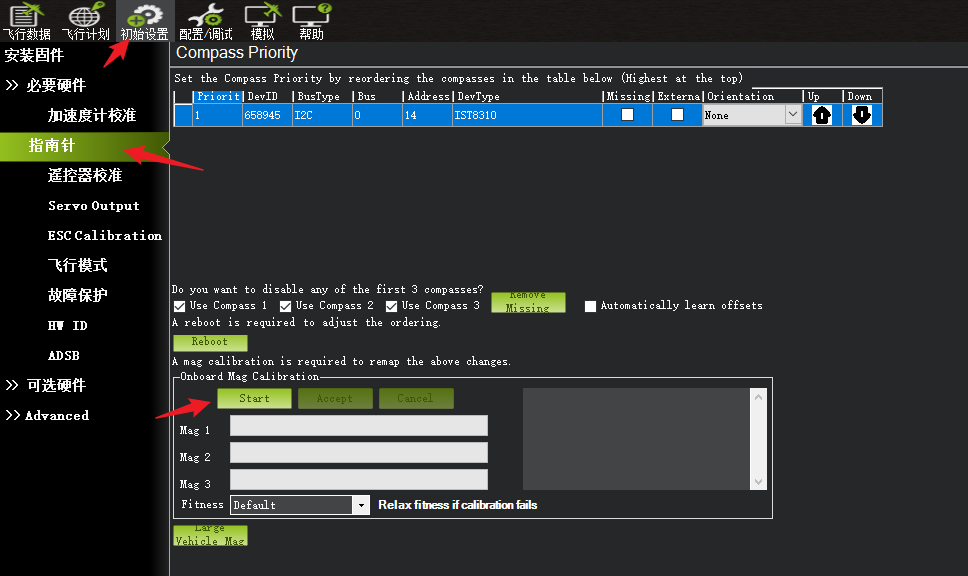
依次将飞控按下面的姿态放置,垂直旋转360°(顺时针/逆时针均可)后,按下一个姿势放置并进行旋转,直到完成六个面旋转,即可完成校准;

如上图所示,无人机/飞控的放置的姿态依次为:正面朝上、正面朝左、正面朝右、机头朝下、机头朝上、正面朝下;
如果六个面旋转完后都没有完成校准,则自由转动飞控,以完成最后校准进度,校准完成后重启飞控才能生效;
遥控器校准
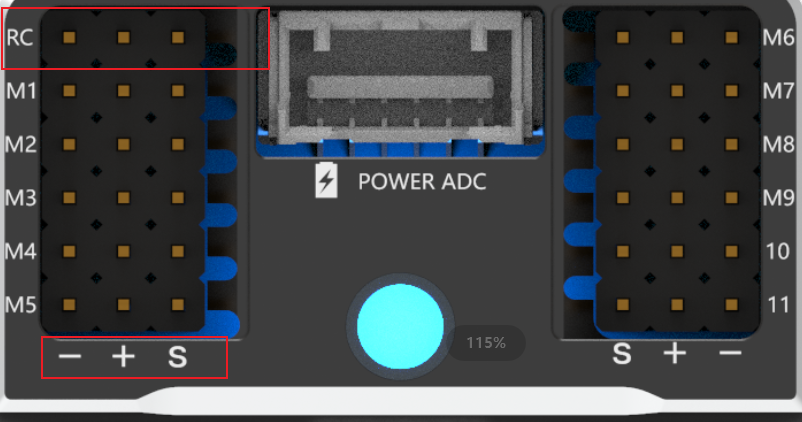
A6 SE飞控支持PPM、SBUS、DSM制式的遥控器接收机,将遥控器接收机插入飞控RC接口,接线时请注意接收机的正负极性和信号线的方向,不要插反;
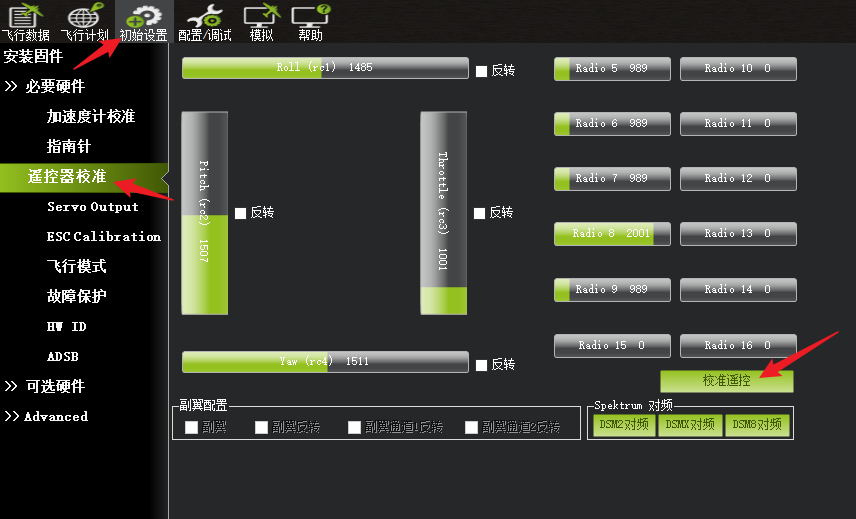
打开上位机遥控器校准页面(初始配置->必要硬件->遥控器校准),打开遥控器电源,此时可以看到界面上各个遥控器的通道出现数值;
由于大家使用的遥控器型号各异,遥控器本身的设置也有所不同,因此需要大家自行设置遥控器通道输出;
通道输出的要求如下,至少按以下要求设置五个通道数值和方向,以实现无人机的基本操纵:
通道1(CH1):配置为横滚摇杆,对应校准界面的Roll值,建议数值范围1000(摇杆最左侧)~2000(摇杆最右侧);
通道2(CH2):配置为俯仰摇杆,对应校准界面的Pitch值,建议数值范围1000(摇杆最上侧)~2000(摇杆最下侧);
通道3(CH3):配置为油门摇杆,对应校准界面的Throttle值,建议数值范围1000(摇杆最下侧)~2000(摇杆最上侧);
通道4(CH4):配置为航向摇杆,对应校准界面的Yaw值,建议数值范围1000(摇杆最左侧)~2000(摇杆最右侧);
通道5(CH5):配置为三段切换开关,对应校准界面的Radio5值,建议数值范围1000~2000,无方向要求;注意:请仔细对照和检查上面的通道数值和方向,否则飞行操纵时会出现相反的操纵方向,造成伤害!
配置好后,点击校准页面的”校准遥控“按钮,将每个遥控通道都打到最小和最大位置,以识别每个通道的最大最小范围,至少五个通道操作完后,点击完成按钮,如下图;

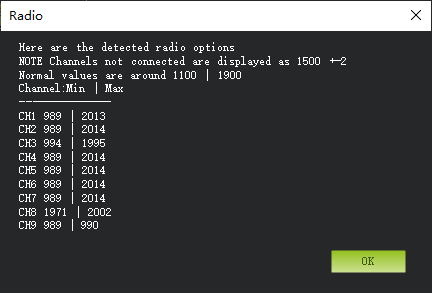
此时,校准完成后,会出现一个弹窗界面,显示已校准的每个通道最大最小值范围,检查是否有遗漏的通道未校准;
输出通道设置
打开输出通道设置页面(初始设置->必要硬件->Servo Output);
本教程的固定翼飞机配备了舵机控制的地面转向轮,因此修改通道5的功能为“GroundSteering”(地面转向轮);
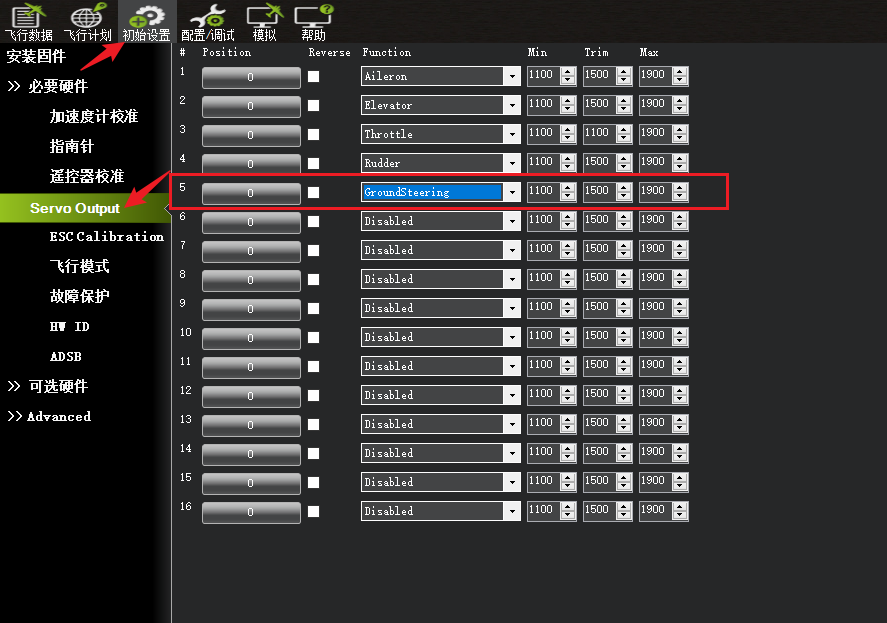
由于Ardupilot的固定翼固件默认限制了各个通道的最小最大范围1100~1900,这会导致舵机的行程范围和电调油门的行程范围都变小;
舵机行程范围变小直接影响到各个舵面上下摆动的幅度变小,电调油门的行程范围变小会影响无人机的动力变小;
本教程不需要约束舵机和电调油门的行程范围,因此修改通道1~通道5的最小值为1000,最大值为2000;

飞行模式设置
打开飞行模式设置页面(初始设置->必要硬件->飞行模式),必须校准完遥控器后才能设置飞行模式;
默认飞控使用遥控器的通道8用于飞行模式的切换,本教程使用通道5来切换飞行模式,因此需要修改以下飞控参数修改成通道5;
FLTMODE_CH = 5修改完后无需重启,飞行模式页面上会显示当前通道5的PWM值,当切换通道五开关时,对应界面上PWM值会修改,同时对应的飞行模式会变成绿色;

切换通道5开关的三个位置,可知对应的是哪三个飞行模式生效;
设置这三个飞行模式分别为:“MANUAL(手动模式)、FBWB(增稳模式)”、“LOITER(定点模式)”,飞行模式开关位置可根据用户的操作习惯而定;
MANUAL(手动模式):用户可以自由操作飞行器,飞控会将遥控控制信号直接映射到执行器上,飞控没有参与自动控制;
FBWB(增稳模式):用户可以自由操作飞行器,无操作时飞控会自动控制飞行器的姿态增稳保持水平;
LOITER(定点模式):用户可以自由操作飞行器,无操作时飞控会自动控制无人机的姿态、高度和位置,并围绕着一个点进行盘旋飞行;
更多飞行模式的介绍,请参考阅读文章“固定翼飞行模式详解”;
电流计设置
本教程使用A6 SE配套的模拟电流计PA100,以下是PA100电流计的设置方法;
打开参数设置页面(配置/调试->全部参数树),找到BATT参数组,修改以下参数;
//设置电池电压电流监控使用模拟采样方式
BATT_MONITOR = 4
//设置电压系数
BATT_VOLT_MULT = 21
//设置电流系数
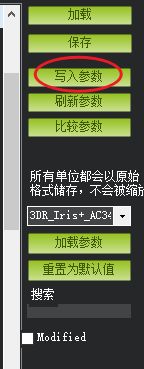
BATT_AMP_PERVLT = 34.6修改完后点击参数表右侧的“写入参数”按钮,以保存修改后的参数;
其他设置
本教程未使用安全开关,因此关闭安全开关功能;
//0:Disabled,1:Enabled
BRD_SAFETY_DEFLT = 0设置无人机的解锁上锁方式都为航向摇杆;
//0:Disabled 1:ArmingOnly 2:ArmOrDisarm
ARMING_RUDDER = 2注意:
如果固定翼无人机需要做一些大机动动作、特技表演,则需要设置ARMING_RUDDER = 1(即只使用航向摇杆解锁,不使用航向摇杆锁定);
因为在大机动动作、特技表演过程中,可能会出现飞控锁定的摇杆操作(油门摇杆收到底部,航向摇杆打到最左侧),进而导致飞控锁定,无人机失去动力;
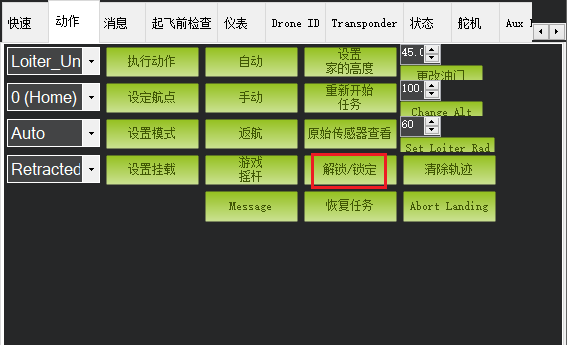
如果设置设置ARMING_RUDDER = 1,遥控器可以给飞控解锁,但是飞控锁定必须通过上位机进行操作,点击上位机首页的“解锁/锁定”按钮,如下图所示;
最后,重启飞控,参数及以上设置即可生效;