电子罗盘校准
Ardupilot飞控
打开电子罗盘管理页面(初始设置->必要硬件->指南针);
点击“Start”按钮开始进行电子罗盘校准;
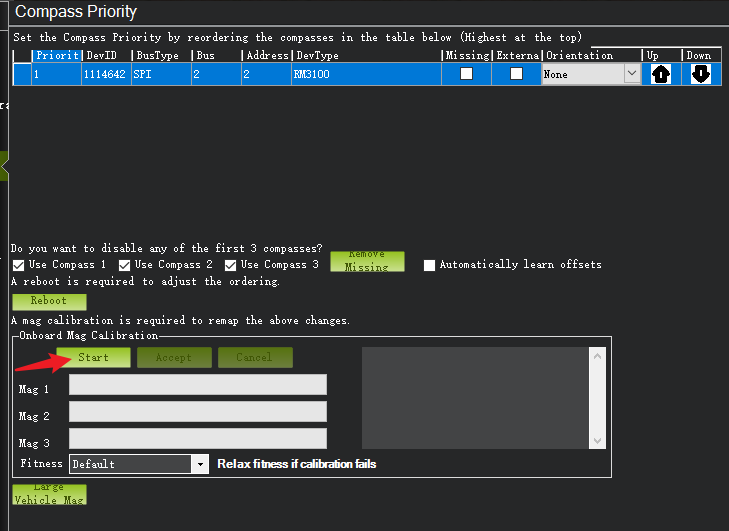
依次将无人机/飞控按下面的姿态放置,旋转360°(顺时针/逆时针均可)后,按下一个姿势放置并进行旋转,直到完成六个面旋转,即可完成校准;

如上图所示,无人机/飞控的放置的姿态依次为:正面朝上、正面朝左、正面朝右、机头朝下、机头朝上、正面朝下;
如果六个面旋转完后都没有完成校准,则自由转动无人机/飞控,以完成最后校准进度,校准完成后重启飞控才能生效;
PX4飞控
打开电子罗盘校准页面(Vehicle Setup->Sensors->Compass);
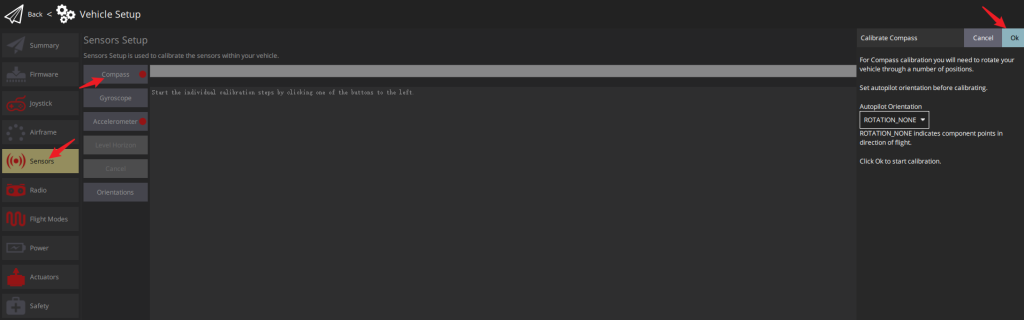
如下图所示,将无人机/飞控任意选择下面六种姿态之一进行放置,飞控识别到该姿态之后,对应的方框变成黄色并提示你旋转飞控(顺时针/逆时针旋转均可);
旋转完360°后,该方框变成绿色,表示该姿态校准完成,选择下一个姿态进行放置,并进行旋转校准,直到六个姿态都完成旋转校准才算完成磁罗盘的校准;


电子罗盘校准完成后,需要重启飞控才能生效;
罗盘优先级
无人机上的电机、电调、电源模块等大功率用电设备,容易产生电磁干扰;
外置电子罗盘的传感器精度一般都优于飞控内置的电子罗盘,小巧易安装,可以轻松地安装在无人机上不易受到电磁干扰的位置;
如果使用了外置电子罗盘,建议将外置电子罗盘的优先级设成最高,飞控优先使用外置罗盘的数据来测量航向;
下面介绍罗盘优先级的调整方法,针对不同的开源飞控进行介绍;
Ardupilot飞控
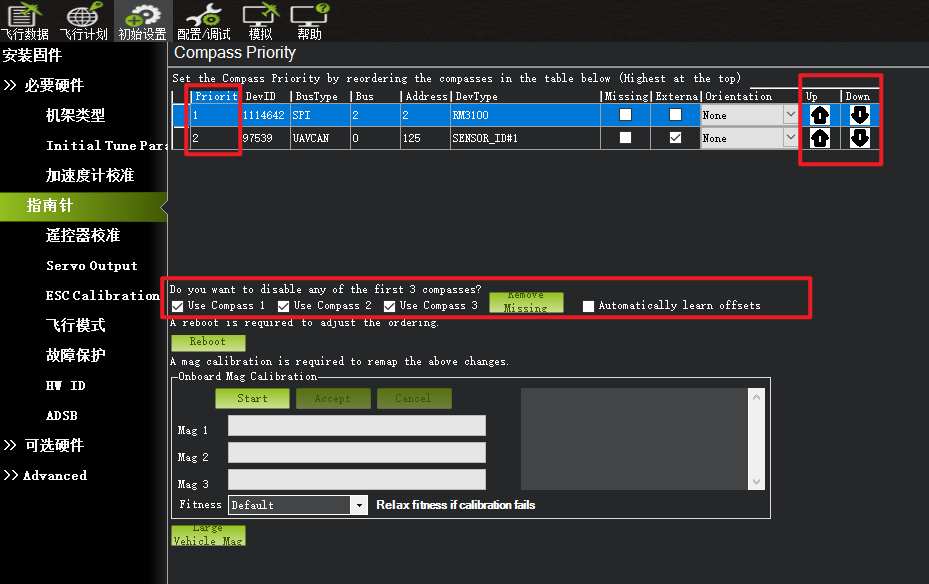
打开电子罗盘管理页面(初始设置->必要硬件->指南针);
如下图所示,优先级序号越小(1表示最高优先级)优先级越高,可以通过设备列表右侧的Up和Down按钮调整设备的优先级;
如果某个电子罗盘已经确定受到磁场干扰,可以将对应的电子罗盘关闭,如将”Use Compass 2″取消勾选,即飞控将不再使用电子罗盘2的数据用于飞行控制;