准备工作
为展示从零装好一台四旋翼无人机,本教程准备了如下所需要用到的零件和模块:
- 无人机飞控:YJUAV A6 SE,无人机飞行控制的核心大脑;
- 多旋翼板载电流计:YJUAV PB100,为动力套件和飞控供电的同时,可测量整机电压电流数据;
- GPS模块:YJUAV NOTE 3,为无人机提供GPS定位能力;
- Wifi数传:YJUAV UAV-Link,建立近距离无线通信链路,可在地面监控空中的无人机;
- (可选)远距数传:YJUAV P9 DataLink,建立远距离无线通信链路,在超视距飞行、RTK定位等应用场景,需要使用远距的通信链路;
- 遥控器及接收机:JUMPER T12 Pro + SIYI FM30,实现远程操纵控制无人机;
- 锂电池:6S 8000mah锂电池,给无人机所有用电设备提供电源;
- 四旋翼机架:ZD760机架,76cm轴距四旋翼机架,无人机身体骨架;
- 动力套件(电调+电机+螺旋桨): 电调Hobbywing X-Rotor 40A + 电机Sunnysky X4110S-20 + 螺旋桨1855碳纤桨,为无人机提供飞行动力;
以上为本教程装机用到的零件和模块,方便大家组装出自己的无人机,大家也可根据自己现有的零配件自行选择;
飞控设置
由于飞控需要进行多项设置及校准操作,有些操作在装机后不便进行,所以在装机前应先单独进行飞控的设置,请参考文章“多旋翼无人机-设置篇”;
装机视频
详细装机过程请参考以下装机视频;
装机步骤
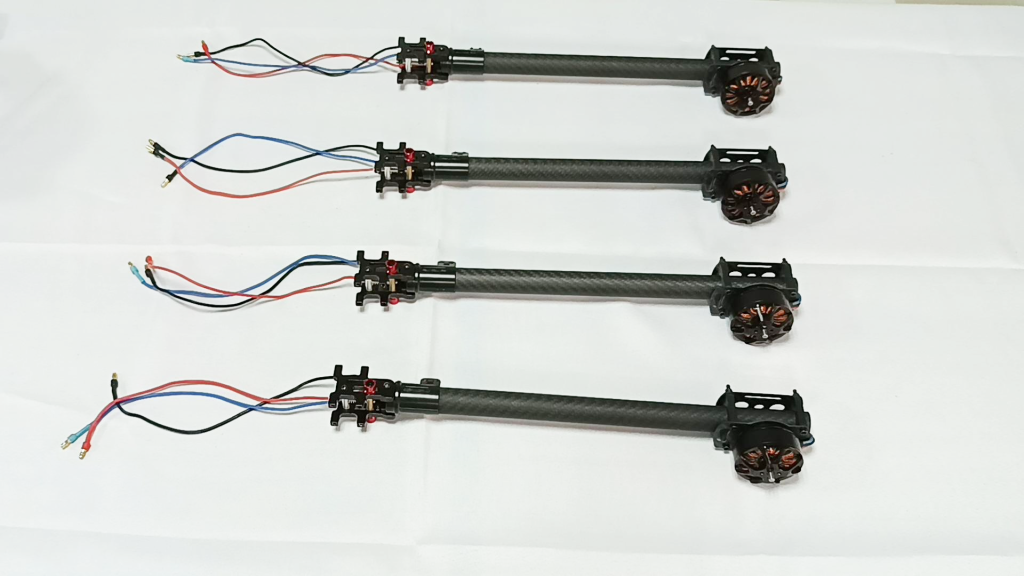
机架预装
组装好四个机臂;
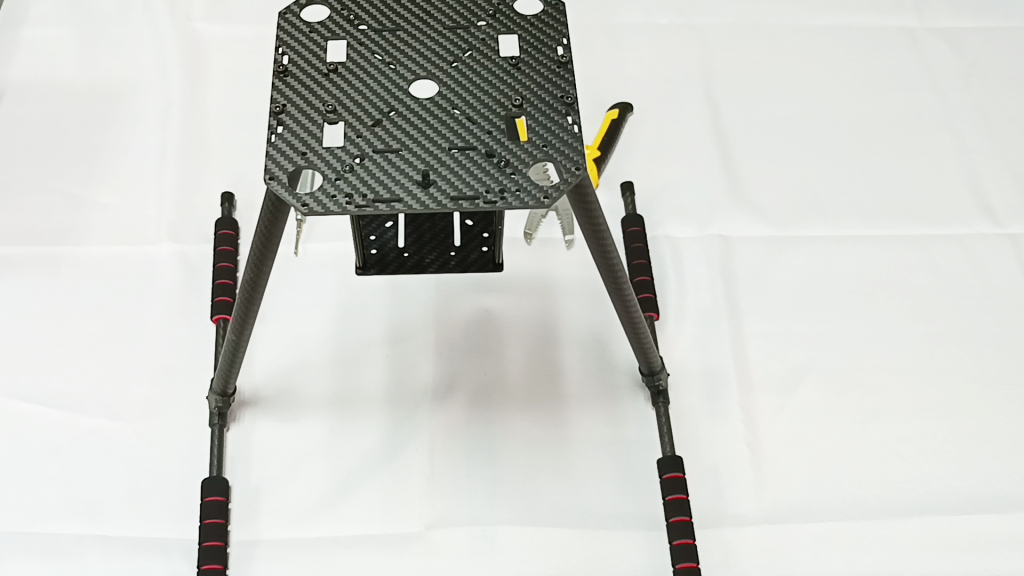
组装好飞机两侧的起落架;

将起落架安装到中心板下板;

组装电池挂载板;
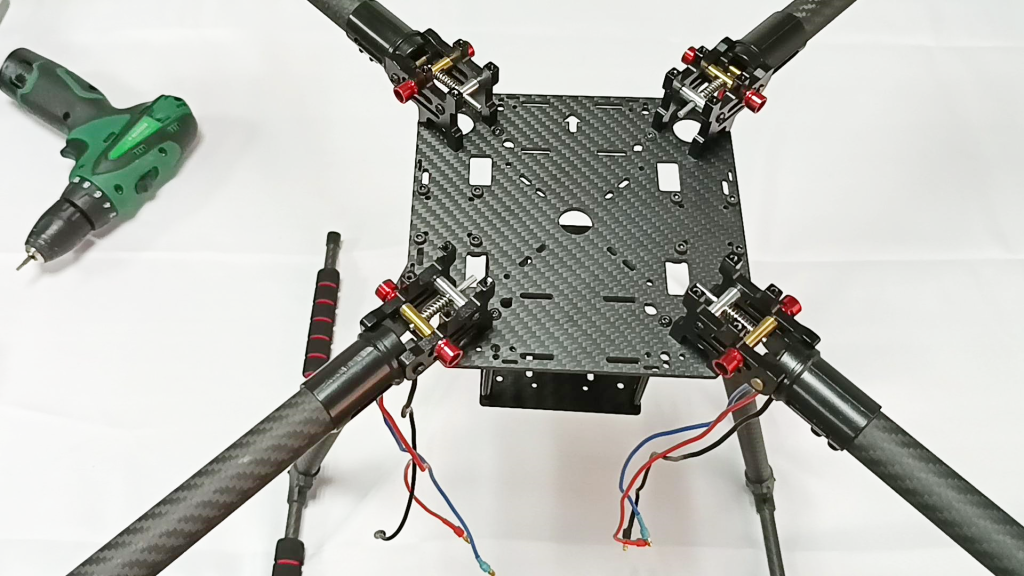
将机臂安装到机架上;
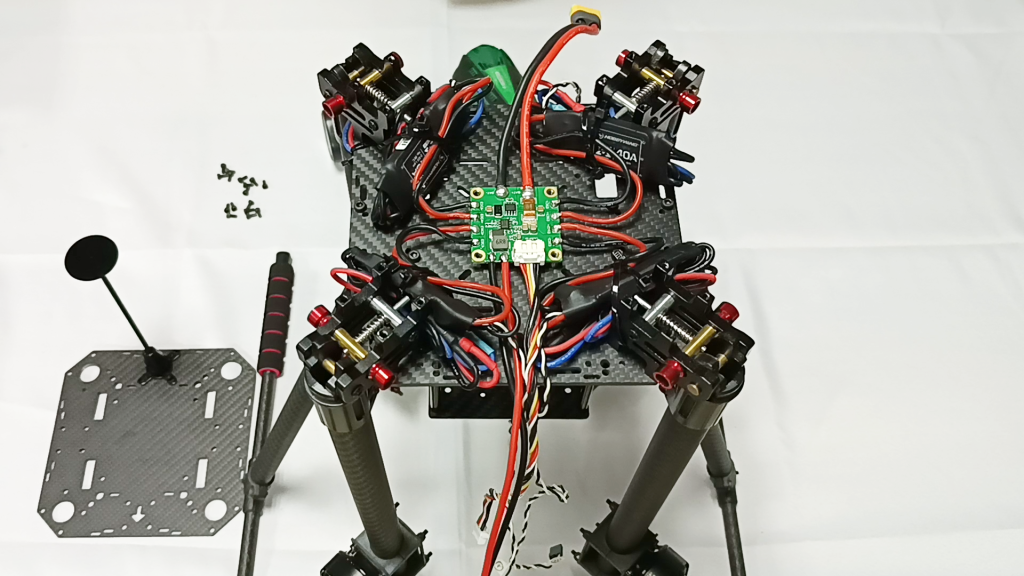
动力套装焊接
将四个电调依次焊接到板载电流计PB100上;
将板载电流计安装到机架上;
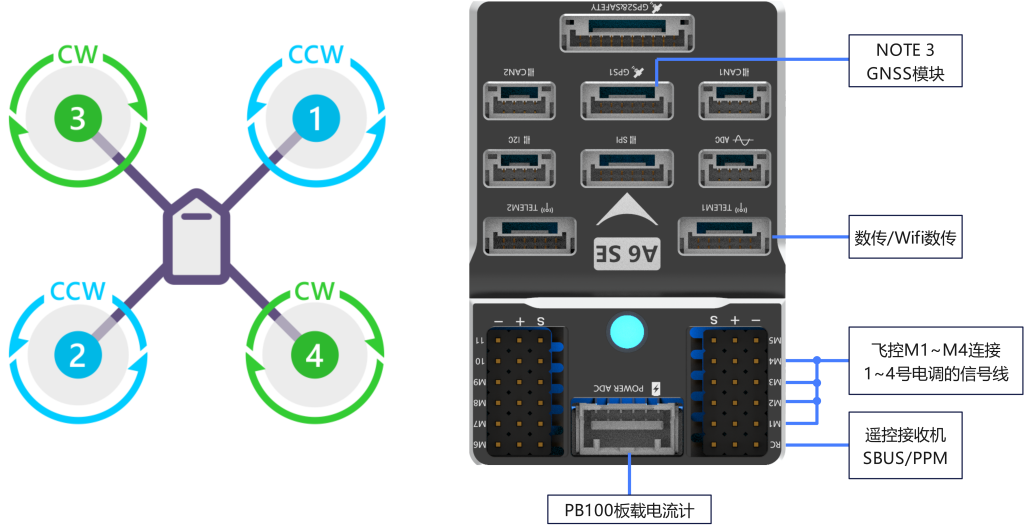
电调校准及旋转方向确认
本教程使用遥控器接收机直接对电调进行校准,飞控只是为了给接收机供电的作用,用户也可以选择用其他的方式给接收机供电,电调校准的步骤如下;
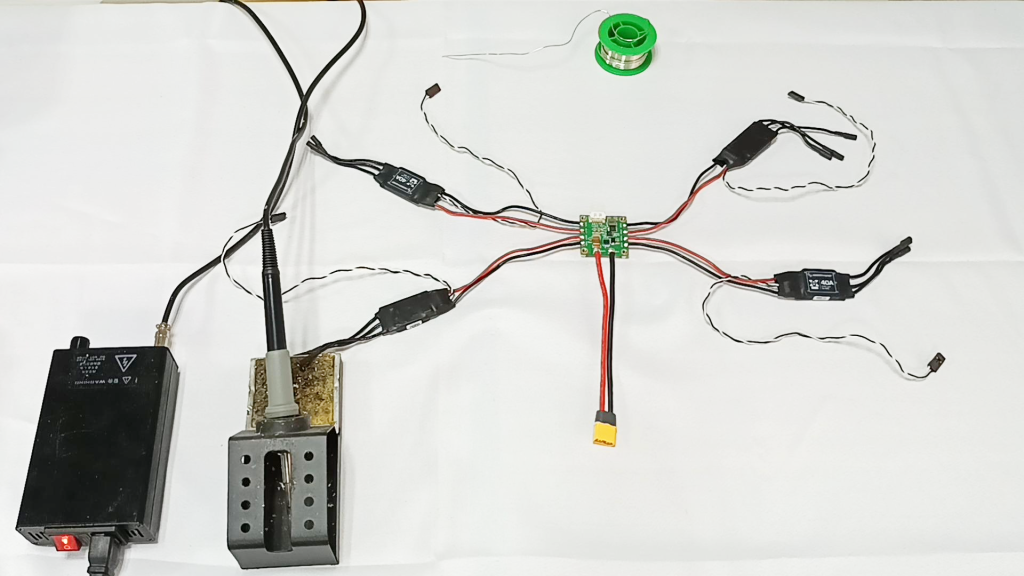
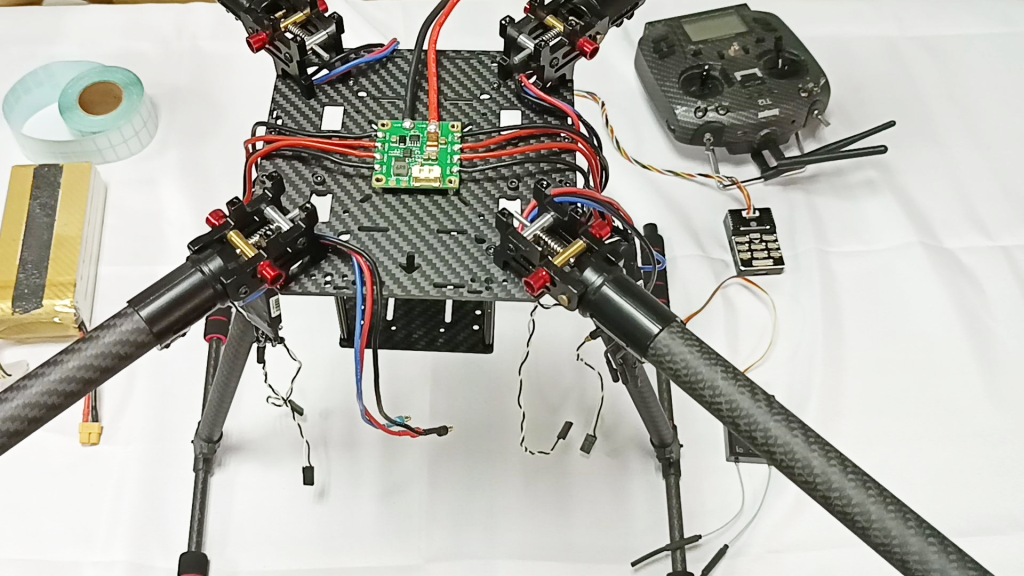
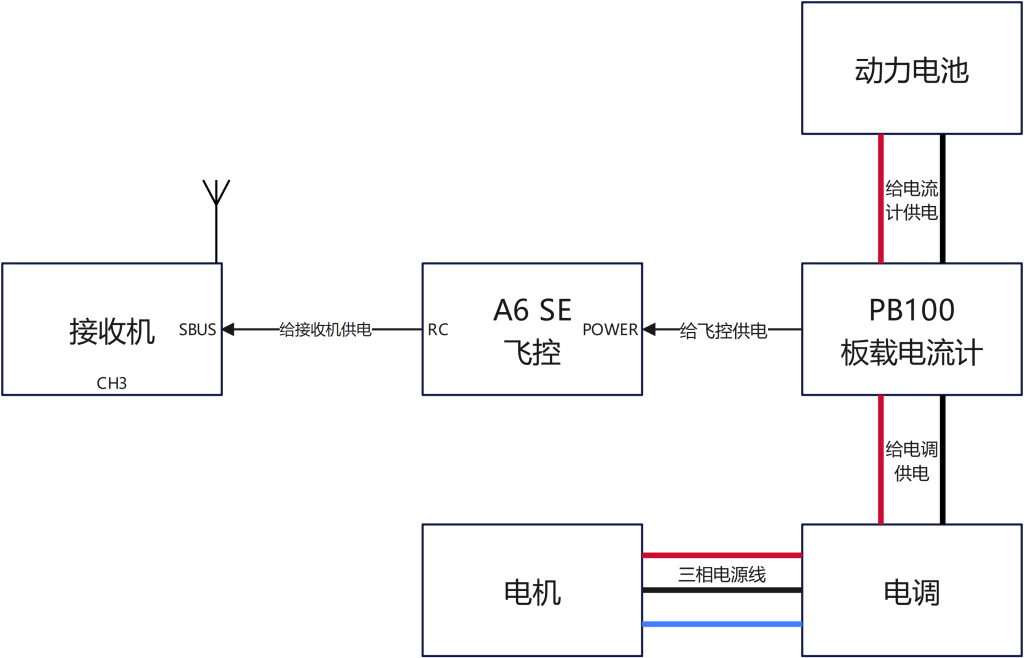
1、如下图所示,连接各个设备,细节操作也可以参考视频内容;
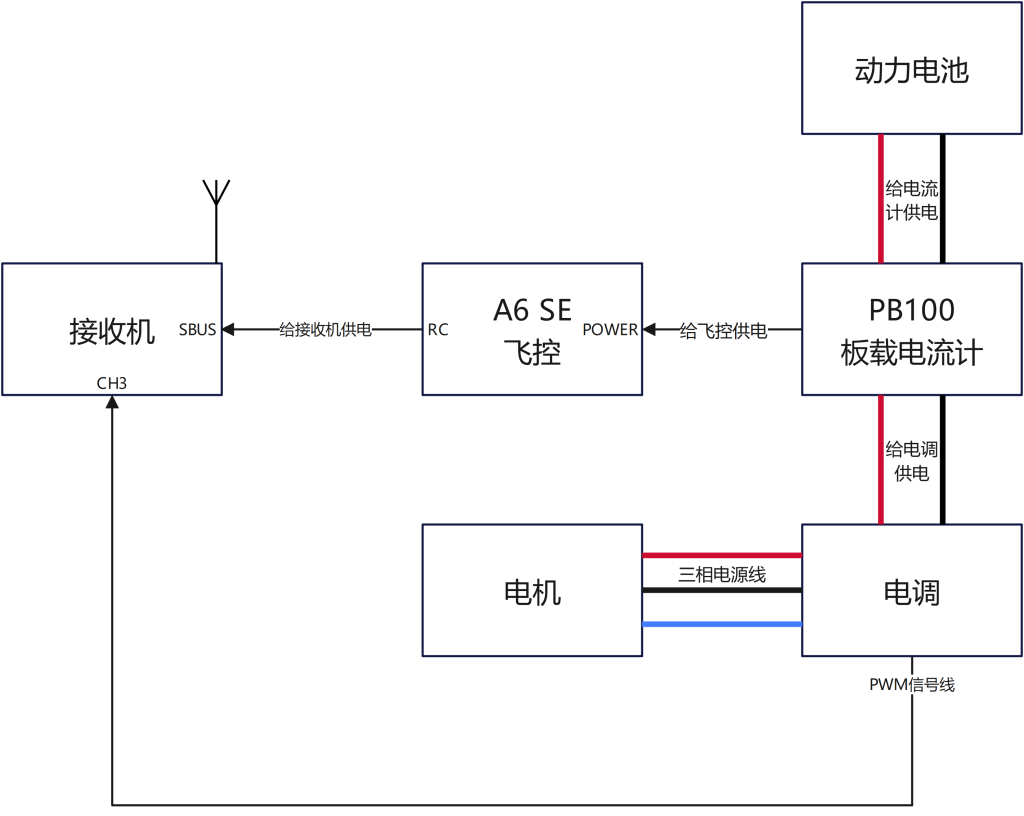
2、先将遥控器的油门通道打到最高处,然后再将电调的信号线接入到接收机的油门通道(CH3),如下图;
3、听到电机发出“滴滴”两声,代表电调识别到了最高油门;
4、然后将遥控器油门打到最底部,听到电机发出“滴”一声,代表电调识别到了最低油门;
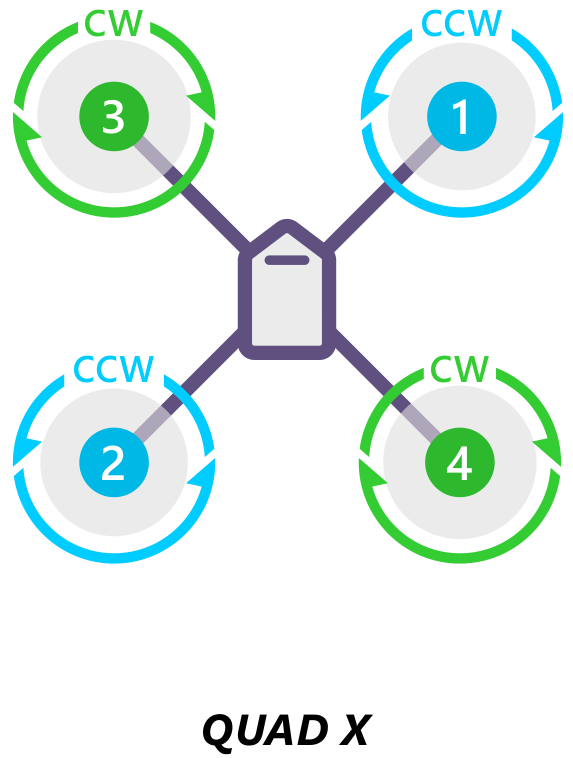
5、轻推油门,观察电机的旋转方向是否正确,如下图所示;
6、如果电机旋转相反,则任意对调电机三相电源线中的其中两根即可;
7、断开电调信号线,重复步骤2~6,依次将剩下三个电调校准完成;
注意:
校准电调时,不要接入螺旋桨,防止校准过程中造成伤害!
不同厂家的电调校准过程中,可能电机发出的声音不一样,但是校准的方法流程是一致的!
GPS支架组装
将GPS支架安装到中心板上板;
机架上层板安装
将机架夹层中的设备和走线整理收束好;
然后将上层板安装到机架上,并拧紧螺丝;

飞控设备安装
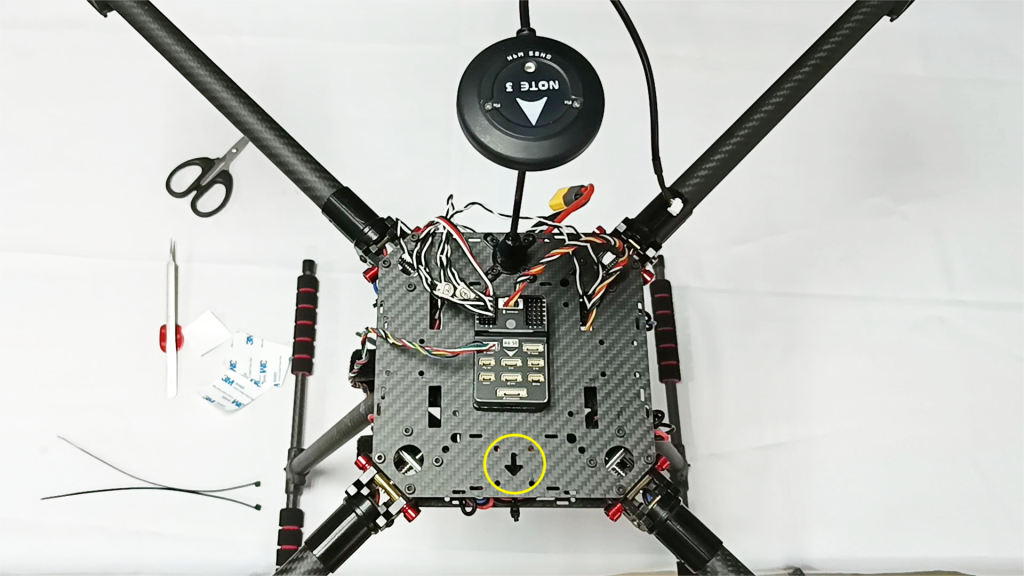
参请考下面连线图连接飞控和其他设备,安装时注意飞控的箭头方向要与飞机的前进方向一致;
下图是安装好的设备图,其中机身上层板的箭头表示飞机的前进方向,安装飞控和GPS模块时,应注意设备的箭头方向与机身的箭头方向一致;
完成组装
依次安装螺旋桨,注意螺旋桨的旋转方向要跟电机旋转方向一致;
最后将飞机的走线收束好,至此整个四旋翼无人机的组装完成;
